哈欠是一种人类和许多动物普遍存在的行为,尽管其具体功能仍有诸多争议,但“传染性哈欠”作为社交互动和情感共鸣的重要体现,一直备受科学界关注。最新研究表明,黑猩猩作为人类最亲近的灵长类亲缘物种,当它们观察到一个类人机器人展示的打哈欠动作时,会出现类似的打哈欠反应,彰显出跨物种乃至跨生物与非生物界限的社交模仿现象。这一发现为探讨动物社会行为机制和人机互动提供了全新视角。打哈欠的社会功能早已被证明涉及情感传递、群体行为同步和状态转换等多方面。在灵长类群体中,打哈欠乃至其传染性被视为个体之间建立共情和纽带的重要体现。以往的研究均以生物体为刺激源,重点关注同种或不同种间的行为模仿和情感感染。
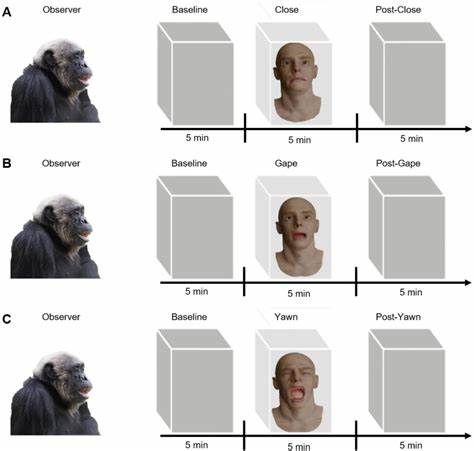
然而,当前研究突破了传统界限,利用由高级伺服电机驱动、拥有类似人类面部肌肉运动的类人安卓机器人,模拟打哈欠等面部动作,考察成年黑猩猩对非生物体的行为反应。研究团队设计了三种机器人面部表情条件:完全张口模拟哈欠(Yawn)、部分张口的“开口”动作(Gape),以及嘴巴闭合保持静止(Close)。成年黑猩猩分别暴露于这些条件下,并通过长时间的录像分析它们的打哈欠频率、注视时间和休息行为。结果显示,只有机器人展示完全打哈欠动作时,黑猩猩的打哈欠频率显著增加,且该反应不仅出现在呈现阶段,甚至在机器人停止动作后的观察阶段仍能见到持续的模仿行为。相比之下,控制条件中没有观察到明显的传染性打哈欠。此外,在强烈的打哈欠条件下,黑猩猩表现出更多躺卧等休息相关行为,表明它们可能将打哈欠视为休息或放松的社交信号。
这一现象支持了打哈欠不仅是纯粹的运动共振反应,也蕴含了上下文和情境推理的成分。值得注意的是,尽管机器人明确表现出非生物身份,其逼真面部动作和动态细节足以诱发黑猩猩的行为模仿,说明黑猩猩对社交线索的识别不仅限于熟悉的生物体,而是对某些关键行为特征敏感。这暗示了社交认知的基础机制可能关注动作的生物学意义或功能性信息,而非单纯的物种归属。此外,观察时间与打哈欠数量之间存在显著正相关,进一步验证了关注度在传染性行为触发中的作用。本研究的实验设计严谨,利用定制的物理机器人头部,实现极高的运动时间精确性,保证机器人打哈欠动作的重复一致,对比了打哈欠与开口以及静止状态的差异化效应。数据分析采用非参数统计方法,确保结果的稳健性和科学性。
对行为编码的高信度评分亦强化了研究结论。研究的伦理合规和对实验环境的精心控制,保障了动物福利和数据的真实性。理解黑猩猩对非生物行为的模仿反应,不仅深化了我们对灵长类社交机制的认识,也对人工智能和机器人技术在人类及动物社交领域的应用具有启示意义。作为未来研究的方向,如何进一步分析各种非生物动作对动物行为的影响、多样化动作与情绪表达的关联,以及动物对机器人个性化特征的适应性,都是值得深入探讨的问题。此外,跨物种社交催化机制也可能为设计更有效的人机交互界面提供理论支持。生物行为的传染性涉及复杂的神经和心理过程,其中非意识的模仿机制与情绪共振密不可分。
黑猩猩的此次反应开放了关于“社交机器人”在动物认知科学中角色的讨论,展示了机器人不仅能作为工具,也可能成为研究情感和认知互动的新伙伴。研究还呼吁在动物守护和教育场景中谨慎引入人工智能元素,结合动物天性需求,建立更和谐的共存方式。总结来看,黑猩猩在观察类人机器人打哈欠时表现出的模仿行为,凸显出生物行为的复杂性与适应性,表明其群体协作与沟通机制具有跨界容纳能力。由此我们看到,未来随着机器人技术的发展,人工智能将在理解动物本能反应、促进跨界交流和生态保护等方面发挥越来越重要的作用。对生物与人工行为交互的深入研究,不仅能丰富动物行为学理论,也能推动人机协作向更具情感智能和自然交互的方向迈进,为科技与自然界的融合带来更多可能。