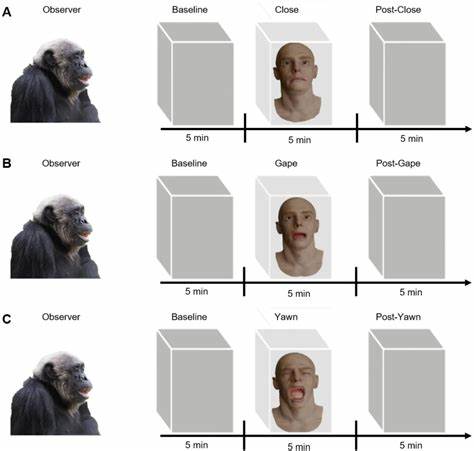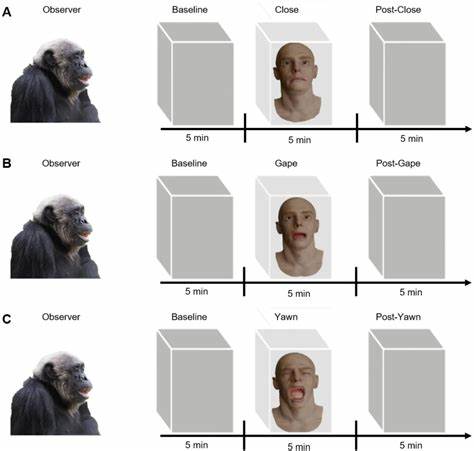
打哈欠在许多动物中是一种常见且富有意义的行为,尤其在人类和灵长类动物中,打哈欠不仅反映生理上的疲倦,还具备社会联结与情感共鸣的功能。科学研究已证明,猩猩等非人类灵长类能够对同类的哈欠产生模仿行为,这种称为“传染性打哈欠”的现象被认为与共情能力相关。然而,最新的科学报告显示,即使是面对非生物、类人机器人,猩猩仍然会表现出同样的传染性打哈欠行为,引发了对社会认知和跨物种交互机制的新思考。近期发表于《Scientific Reports》期刊中的研究揭示,猩猩在观察一个逼真的类人机器人模拟打哈欠时,也会受到感染而打哈欠。这一发现不仅挑战了打哈欠只发生在生物个体之间的传统认知,也为理解动物情感与认知的边界打开了新窗口。研究团队设计了一款能够模拟人类面部动作的类人机器人头部,通过编程实现不同的面部表情动作,包括完全张大嘴巴的打哈欠动作、中度张口的张嘴动作以及闭嘴的静止表情。
猩猩被分成多个组别,分别观察机器人执行上述不同动作时的行为反应。实验结果显示,猩猩在机器人表现出完全打哈欠动作时,唤起的传染性打哈欠频率显著高于其他两种表情条件。此外,它们还表现出更多与困倦和休息相关的行为,比如躺下、收集窝垫和搭建巢穴。值得注意的是,这种行为并非在机器人仅仅张嘴或保持闭口状态时观察到,充分体现了打哈欠动作对猩猩的独特社会和生理暗示意义。猩猩的这种反应说明,它们不仅能够识别和模仿同类的社交信号,还能将此类信号泛化到非生物、甚至机械式的类人生物体上。这种“跨代理”打哈欠传染行为表明,猩猩的社会认知系统对打哈欠这一强烈的行为符号具有高度敏感性,而不局限于生物学范畴。
传染性打哈欠作为一种复杂的社会行为,长期以来被视为共情的一个指标,涉及非意识的模仿即“感知-动作耦合”机制。科学家们认为,看到他人打哈欠能够激活大脑中的镜像神经元系统,从而引发自身的打哈欠反应。猩猩在面对类人机器人的打哈欠时表现出这一机制,体现了其认知系统的灵活性和广泛适用性。研究还指出,这种打哈欠行为不仅仅是单纯的模仿,背后可能包含更深层的认知推断。猩猩可能将机器人打哈欠这一信号视作环境中的休息暗示,从而调节自身的行为状态,比如进入休息阶段。这一点得到了猩猩在观察机器人打哈欠时,更多躺下和构建巢穴行为的支持,进一步强调了打哈欠在群体生活中促进同步和调节状态的作用。
实验过程中研究人员严格控制了视觉环境和机器人动作的时间参数,确保猩猩对动作的感知精准,而结果表明,猩猩即使能够自由移动并选择是否观看机器人,也倾向于在打哈欠条件下长时间注视机器人,表明这种行为极具吸引力和重要性。技术上,机器人面部动作由多个微型伺服电机控制,精确模拟人类面部肌肉运动,使得机器人即便是在不同角度观察下仍具有较强的生物类比性。这一设计突破成为实验成功的重要保证,也促进了机器人与动物行为学跨领域的结合。该研究在伦理上严格遵守动物行为学领域规范,猩猩均为保护区内的成年个体,实验全程非侵入且关注动物福利。研究发现为理解非人类灵长类社会行为奠定了新基础,且具有广泛的应用前景。首先,这为未来机器人在动物福利、行为矫正和康复中的应用提供了科学依据。
利用类人机器人模拟自然行为,能够促进动物的社会联结和情绪调节,其潜力值得深入挖掘。其次,研究结果挑战了仅生物体之间存在复杂社交情感和认知机制的传统观点,促使科学界重新审视“共情”“模仿”等心理学概念的边界。进一步研究可以探讨机器人动作与动物不同社交信号的交叉影响,全面揭示社会认知的底层机制。此外,这一发现激发了对人工智能与动物行为学交叉领域的兴趣,推动设计更具社会互动能力和适应性的社会机器人。这样的机器人不仅服务人类,更可能成为动物行为和情感研究的有效辅助工具。传染性打哈欠作为进化过程中具备重要社会功能的行为,其在非生物“社交伙伴”引发的表现,为我们解读进化心理学提供了宝贵线索。
生物和人工智能交织的未来将不断挑战我们对“社会性”的认知,而猩猩对机器人打哈欠的自然反应,无疑是这一进程中的精彩注脚。总的来看,猩猩观察类人机器人打哈欠并产生同样行为,说明社会传染行为不受限于物种或生物性。此现象不仅深化了对动物认知和情感的理解,也为人机互动和机器人设计开辟了新方向。未来,更多关于机器人与多物种间互动的研究,将有可能揭示自然界社会行为的隐藏秘密,为人工智能融入生态系统提供有力支持。