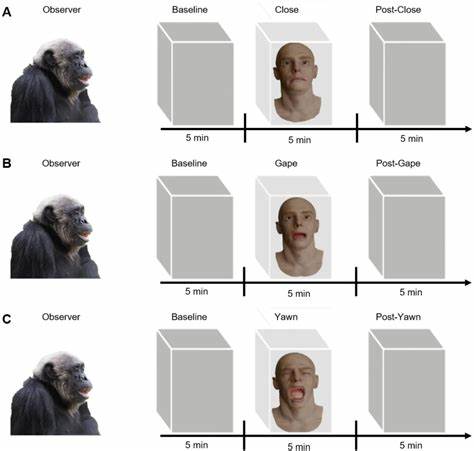
打哈欠不仅是人类和许多动物常见的生理反应,它还是一种复杂的社会现象,涉及情感共鸣和行为模仿。近年来,关于传染性打哈欠的研究在灵长类动物之间得到了广泛关注,特别是在与同类个体之间的互动中被视为情绪传递和社交连接的标志。但令人惊讶的是,最新的研究发现非生物体——即类人机器人(安卓)也能激发猩猩产生传染性打哈欠,这一发现为理解动物与人工智能之间的互动奠定了重要基础。猩猩是人类最亲近的进化亲缘物种,它们拥有高度发达的社会认知能力和共情机制。科学家们设计并制造了一款高度拟人化的安卓头部,该机器人能够模拟人类面部表情动作,包括打哈欠、张嘴等。实验中,14只成年猩猩在不同条件下观察该机器人,分别暴露于机器人打哈欠、张嘴(但非打哈欠的动作)和闭嘴三种情境。
研究发现,猩猩在观看机器人打哈欠时,表现出明显的传染性打哈欠行为,且这一反应在张嘴和闭嘴条件下明显减少甚至缺失。这表明打哈欠不仅是一种同种之间的情绪和行为传染,它还可以被非生物但具备特定动作特征的代理体所诱发,挑战了传统认为模仿反应需基于社会熟悉性和同种个体间互动的观点。更具意义的是,观察机器人打哈欠期间,猩猩还表现出如收集床垫、造巢和躺下等与休息相关的行为,其行为状态显示出放松和低唤醒的倾向,这暗示打哈欠作为一种信号具有传达环境信息的功能,例如暗示“休息时间到了”。这些联动反应不仅说明打哈欠的传染性具备简单的模仿机制,也涉及对情境的推断和理解。猩猩这种跨代理体的社会行为展现了对非生物刺激的高度敏感性,反映了进化中保留的认知灵活性。机器人动作的生物真实性及其连续流畅性是触发猩猩回应的关键因素,同时也说明动作识别系统不仅依赖于生物特征,还能对模拟的社交信号做出反应。
传染性打哈欠与情感共鸣密切相关,是理解社会动物如何通过行为同步建立社交纽带的重要窗口。猩猩对机器人打哈欠的反应揭示了模拟动作能激活类似感知—动作耦合机制,这种机制在人类与机器人互动研究中也被广泛探讨。观察研究支持了“感知—动作通路”,即通过无意识的模仿促进社交联结和信息传递。该发现为人工智能与动物行为学领域提供了交叉融合的研究方向,有助于设计更具社会感知能力的机器人系统,以更好地适应与不同生物物种的互动需求。对猩猩而言,机器人不具备生物身份,但其具有具体的物理形态和动作特征,这使其能够成为诱发社交行为的新媒介,甚至可能在人机共存环境中促进对动物福利和训练方案的创新。此外,此项研究还对理解打哈欠的多重功能提供新视角。
除了传统认为的生理调节和群体协调作用,打哈欠还可能充当社交信号,促进行为同步和环境导航。猩猩响应机器人打哈欠的事实暗示,这种行为不受限于亲缘关系,也不依赖于复杂的社会认知,而是响应于更基础的动作信息。未来的研究可以进一步探讨其他机器人动作能否引发更多类型的行为传染或情感共鸣,并扩大至更多物种,以揭示人工智能对动物社会行为的潜在影响。总之,猩猩对类人机器人打哈欠的传染反应展示了非生物代理体也能激活动物深层的社交机制,突破了传统社交行为限制,为理解情感传染、模仿与机器人交互提供独特视角。这一突破不仅丰富了灵长类动物社交行为的研究内涵,也为机器人设计和跨物种交流打开了全新空间,有望推动生物行为学、认知科学和人工智能的深度融合和未来发展。