在计算机图形学、机器人学以及虚拟现实等领域,如何准确而高效地描述和执行空间旋转一直是一个重要课题。传统的欧拉角虽然直观,但存在万向锁问题且在插值时容易出现异常。四元数作为一种强大且实用的数学工具,凭借其独特的结构和优势,成为旋转计算中的主流选择。本文将详细介绍四元数的基本概念、核心操作、与欧拉角的转换以及在3D旋转中的各种应用,助力读者掌握这一旋转的利器。 四元数是一种扩展复数的数学结构,包含一个实部和三个虚部,整体可视为四维向量。通常表示为q = (x, y, z, w),其中w代表实部,(x, y, z)代表虚部向量。
其四维本质不仅使旋转计算更加简洁,也有效避免了欧拉角所带来的角度奇异现象。 四元数的模长或者称为幅度,是计算旋转过程中重要的参数。通过计算四个分量平方和的平方根即可获得,这个数值用来保证四元数单位化。单位四元数(模为一的四元数)可以完美表示三维空间中的旋转,无需冗余。四元数的归一化即将其每个分量除以模长,是确保旋转准确性的基础步骤。 四元数乘法是其核心运算,相较于简单的向量乘法,四元数乘法遵循特定的结合规则且不满足交换律。
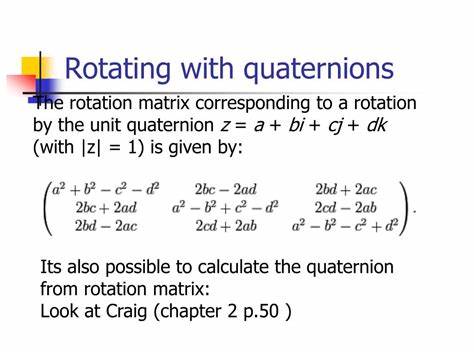
这种乘法对应着旋转的复合,例如先绕某轴旋转后再绕另一轴旋转,可以通过依次乘以相应的单位四元数实现。计算四元数乘积时,实部与虚部分量交叉组合,保证结果仍是一个四元数。 四元数与欧拉角的转换在实际使用中至关重要。通常三维物体的方向以欧拉角表示,方便理解与编辑,但在计算机内部会转化成四元数以运算。以ZYX顺序为例(即先绕Z轴偏航,再绕Y轴俯仰,最后绕X轴横滚),每个角度经一半角余弦和正弦计算后,组合生成对应四元数,实现从直观角度到数学旋转的桥梁。 在3D渲染中,将四元数转换成旋转矩阵是不可或缺的一步。
旋转矩阵是一个4×4的同质坐标矩阵,能被图形API直接处理,对物体模型进行变换。四元数转矩阵的过程基于四元数分量的相乘组合,形成矩阵上的每一个元素,保证旋转一致且方便进一步变换,比如平移与缩放叠加。 绕任意轴旋转时,通过轴向量和旋转角度计算获得对应的四元数。核心思想是将角度的一半作为四元数的实部余弦,轴向量乘以角度一半正弦作为虚部。利用该定义,旋转定义变得简洁且易于计算,广泛用于动画骨骼动态和物理仿真。 四元数的共轭操作用于反转旋转方向,与四元数的逆密切相关。
对单位四元数而言,共轭即为其逆,乘积与自身的逆可得到单位四元数,代表无旋转的恒等象限。利用共轭,我们能够方便地计算出向量在空间中围绕国际轴的旋转结果。 通过四元数旋转向量无需借助矩阵变换,节约了计算资源。具体方法是将向量转换为纯虚四元数,先与旋转四元数相乘,再乘以旋转四元数的共轭,最终得到旋转后的向量部。此技术广泛应用于实时图形渲染和物理模拟,保证了高性能和准确性。 除了基础的旋转表示,四元数还支持更高级的运算,如指数和对数运算。
这些函数虽然抽象,但在四元数幂运算和球面线性插值(Slerp)中发挥关键作用,使得连续旋转插值自然顺滑,避免了线性插值带来的不连续和变形。 四元数幂运算可以实现角度的缩放。如将某四元数旋转指数提升到0.5,实现减半旋转角度,或扩大旋转倍数。其实现基于四元数对数和指数的复合操作,提供了旋转插值和动画Blend的数学基础。 Slerp(球面线性插值)是四元数最具代表性的用法之一。通过参数t在0到1之间插值,能平滑过渡两个旋转状态,常见于交互动画、摄像机移动和平滑旋转中。
相比欧拉角插值,Slerp避免了万向锁和不连续,体现了四元数应用的优越性。 然而直接使用Slerp有时会遇到路径选择错误,导致旋转绕大角度走弯路。这时候引入四元数点积判断,可以检测两个四元数是否位于四维超球的反对侧。如是则将目标四元数取反,实现最短路径插值,得到更加自然的动画效果。综上,四元数点积不仅用于判断旋转倾向,还用于改进插值算法,是实用的数学工具。 四元数的应用涵盖计算机图形、机器人运动控制、航空航天导航等多个关键场景。
在虚拟现实和游戏引擎中,四元数被用来实现流畅且高效的物体旋转和摄像机动态切换,推动了沉浸式体验的发展。理解并掌握四元数相关算法,是图形开发者和相关工程师的必备技能。 综上所述,四元数提供了一种强大的框架,用于在三维空间中表达和计算旋转。其数学特性避免了传统欧拉角的问题,为动画和渲染提供了稳定、连续和高性能的旋转方案。通过全面理解四元数的基础概念、操作方法与高级应用,能够更好地设计和实现复杂的旋转效果,推动计算机图形和相关领域的发展。 。