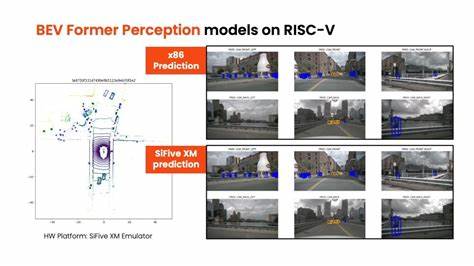
随着自动驾驶技术的不断进步,车辆感知系统的计算需求日益提升,要求处理复杂的多传感器数据并快速作出准确判断。BEVFormer作为一种先进的基于Transformer的鸟瞰视角(Bird’s Eye View,BEV)感知模型,自2022年问世以来,凭借其将多路高清摄像头信息融合为统一三维视角的能力,成为自动驾驶领域的关键技术之一。如今,SiFive公司宣布在其早期访问阶段的RISC-V Intelligence XM平台上成功运行BEVFormer,标志着开放指令集架构在汽车人工智能领域的一大突破。这不仅彰显了RISC-V生态的灵活性和性能潜力,也预示着未来自动驾驶计算平台的变革方向。 BEVFormer模型的独特价值在于其能够综合六路分辨率为900x1600的摄像头输入,通过复杂的空间和时间融合机制,转换出200x200大小的鸟瞰图形象。这种鸟瞰视角的感知输出,对于实现精确的三维目标检测和动态环境理解至关重要。
传统计算架构面临性能瓶颈和能效挑战,难以同时兼顾高计算要求和系统定制需求。RISC-V作为一种开放且灵活的指令集架构,允许芯片设计者针对特定应用优化处理器,成为解决汽车行业长期生命周期和高可靠性要求的理想选择。 SiFive Intelligence XM平台是基于RISC-V架构的人工智能加速IP,采用多核设计,集成四个X系列核心,每个核心配备1024位宽的RISC-V向量单元,专门优化矩阵相关运算。其独特的矩阵引擎和高度集成的架构设计,有效减少了计算延迟并避免了传统异构系统中常见的回退惩罚。正是凭借这一硬件优势,BEVFormer得以在同一二进制环境下无缝运行多样化模块,包括卷积层、变形注意力机制及标量操作,有效简化了软件开发过程并提升了整体执行效率。 在将BEVFormer迁移至SiFive Intelligence XM平台过程中,工程团队面临了诸多技术挑战。
不同深度学习框架和算子支持的差异使得模型转换工作异常复杂。通过SiFive AI/ML参考软件栈结合IREE工具链,团队成功解决了PyTorch 1.9.1与OpenMMLab在导出ONNX格式时的兼容问题,实现了将模型转换为MLIR的关键步骤。针对部分重要算子如Modulated_Deform_Conv2D和Multi_Scale_Deformable_Attention,团队实现了高效的微内核方案,利用RISC-V向量指令集的内建指令极大提升了计算性能。 此外,将基于CUDA的深度学习核函数转换为高效的便携C/C++代码并映射至RISC-V平台,是另一大技术难关。团队借助大型语言模型辅助原型开发,优化移植流程,显著节省了人力和时间成本。矩阵重度运算部分则依托IREE的mmt4d框架映射至矩阵引擎,确保硬件加速的充分发挥。
通过QEMU仿真环境在nuScenes数据集上验证,模型不仅实现了与PyTorch基线一致的准确率,还通过可视化输出证实了感知质量,展现出平台在早期阶段的卓越潜力。 这次成功部署为RISC-V在自动驾驶领域的应用奠定坚实基础。SiFive Intelligence XM平台充分体现出开放架构在灵活定制和性能优化上的独特优势,有望挑战传统专有处理器的市场地位。借助SiFive的AI/ML软件参考栈以及日趋成熟的开源技术生态,更多复杂AI模型将迎来在RISC-V平台上的实验和优化机会。团队正积极推进内核级性能调优和代码生成策略,以持续提升平台表现。 随着汽车智能化需求的加速演进,基于开放标准的计算方案不仅能降低开发门槛,更能支持长生命周期和多样化应用场景。
SiFive的这一突破不仅是对BEVFormer模型的技术移植,也是对未来智能交通系统计算架构的一次深刻革新。业界对该平台的关注度不断攀升,合作与评估的机会日益增多,推动着整个汽车人工智能生态迈向更开放、更高效的新时代。期待更多开发者和行业伙伴共同参与,借助RISC-V开源活力,为自动驾驶技术实现更广泛的应用和创新。 未来,SiFive将继续加强其基于RISC-V的汽车AI解决方案,不断优化硬件设计和软件工具链,推动深度学习模型在边缘设备上的实用化。BEVFormer在Intelligence XM平台上的成功运行,充分体现了RISC-V架构在处理复杂视觉感知任务中的巨大潜力和可扩展性,为智能驾驶系统提供了坚实的智能计算支撑。随着相关技术不断成熟,预计开放指令集架构将在汽车智能领域发挥更加重要的作用,开创更具竞争力和可持续性的汽车电子产业生态。
。