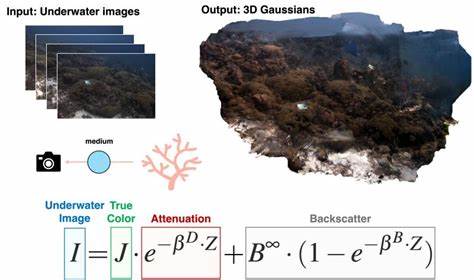
近年来,随着海洋探测技术的进步,水下环境的视觉重建与渲染成为计算机视觉和机器人领域的研究热点。然而,水下环境由于光线传播过程中的介质散射、吸收以及光谱衰减等复杂因素,使得传统的图像重建技术在水下场景中面临巨大挑战。为了突破这一瓶颈,麻省理工学院计算机科学与人工智能实验室(MIT CSAIL)与伍兹霍尔海洋研究所联合研发了SeaSplat,这一创新方法基于3D高斯点绘制(3D Gaussian Splatting,简称3DGS)技术,并结合物理基础的水下成像模型,成功实现了对复杂水下场景的精准表达及实时渲染,开创了水下视觉领域的新篇章。SeaSplat的核心优势在于它不仅能够恢复含有水介质的场景的全彩视图,而且还能去除介质对图像的影响,恢复出场景的真实颜色和细节信息。传统的浸入水中的视觉效果通常因光传播路径中的介质变化而出现颜色偏差、模糊甚至细节丢失,这极大影响了三维重建的准确度及视觉效果的真实感。SeaSplat采用了一种物理基础的水下图像形成模型,结合3DGS以高效计算的方式拟合场景中的光辐射特性,实现介质的依赖性效应建模。
3D Gaussian Splatting本身是近年兴起的技术,相比传统的基于体素或网格的表示,使用高斯点(Gaussians)能够更自然地表示光线的模糊与散射现象。这种表示方法在训练效率和实时渲染性能方面表现优异,极大满足了实际水下探测过程中对计算资源和响应速度的双重需求。SeaSplat应用了水下图像形成模型中关于光线的颜色衰减与散射机制,模拟了光线在水中传播时与介质相互作用的物理过程,从而在其3D高斯点表示中嵌入了水环境特有的半透特性和颜色变化。该模型不仅限于单一波长的修正,更具有多波段适应能力,对不同颜色光束的穿透衰减进行精准建模,使得复原的图像不仅色彩真实,也更贴合实际光学规律。研究中,SeaSplat在多个真实水下场景数据集上展现了卓越表现,尤其在美国维京群岛的SeaThru-NeRF水下数据集中,成功实现了水介质存在下的新视角合成及无介质情况下的真实色彩恢复。这意味着探测者能够从任意角度实时观察水下环境,同时获得类似“清澈视野”的高质量图像,有效克服了浑浊水质对视觉感知的困扰。
除了颜色恢复的出色能力,SeaSplat还能够辅助生成更加准确的深度图。这对于机器人定位、导航以及水下考察任务至关重要。由于物理成像模型的引入,系统能够更好地推断隐含的场景结构信息,提升三维重建的完整性和鲁棒性。值得一提的是,SeaSplat不仅在视觉质量上实现飞跃,同时保留了3D高斯点绘制方法的显著计算优势。相比先前基于神经辐射场(NeRF)的模型训练时间冗长且渲染延迟高的问题,SeaSplat能够实现快速训练和近乎实时的渲染,满足实际水下探测与评估工作中对实时性的严格要求。SeaSplat的发布还伴随着开放的代码库和详细的项目演示,包括来自多个著名水下场景的数据集,如Curasao、Japanese Gardens、Panama等,研究者和工程师可以直接访问并复现相关实验。
该项目无疑为海洋机器人视觉系统、水下考古、生态环境监测等领域提供了强有力的技术支持。未来,随着水下成像设备的不断升级与传感技术的多样化,结合像SeaSplat这样的物理与计算技术融合方案,将极大丰富我们对海洋世界的认知。它不仅推动了科学探索的深入,还促进了智慧海洋、环境保护以及水下影视制作等相关产业的发展。综上所述,SeaSplat作为一种结合了3D高斯点绘制与水下物理成像模型的创新体系,在水下场景重建领域实现了性能和效率的双赢。这一技术不仅提升了水下视觉的感知精度,更为真实感渲染树立了新标杆。对于从事水下机器人研发、环境监测以及数字海洋构建的研究人员和工程师来说,SeaSplat无疑是探索深海奥秘不可或缺的强大利器。
随着技术的普及应用,未来水下视觉技术必将迎来更加辉煌的发展前景。