卡尔曼滤波器作为现代控制理论和信号处理领域的重要工具,广泛应用于导航、定位、金融预测及机器人技术等多个领域。其核心在于通过对系统状态的科学估计,实现对噪声干扰和不确定信息的有效处理。尽管卡尔曼滤波器有丰富的数学理论支撑,但通过简单的推导方法可以帮助初学者更直观地理解其内在机制。卡尔曼滤波器由鲁道夫·卡尔曼在1960年提出,核心思想是利用状态空间模型和高斯噪声假设,以贝叶斯估计为基础,结合预测与校正两个步骤完成对系统状态的最优估计。首先需要明确的是,卡尔曼滤波器在时间的推进过程中,能够不断更新对状态的估计,消除模型误差和测量噪声带来的影响。这个动态更新过程使其特别适合处理线性动态系统的状态估计问题。
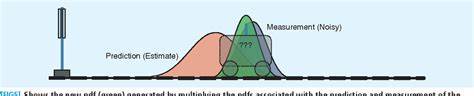
理解卡尔曼滤波器,需要从状态空间模型入手。假设系统的实际状态是隐含的,无法直接测量,只能通过带有噪声的观测值间接获取。系统状态的动态变化由带有控制输入的线性函数描述,而测量模型则将状态映射到观测空间。在理想情况下,状态和测量的噪声都服从零均值的高斯白噪声,这一假设极大简化了统计推断的计算过程。卡尔曼滤波器中的核心方程分为两类:预测方程和更新方程。预测方程基于系统的动力学模型预测当前时刻的状态及其协方差,这一步类似于“猜测”系统接下来可能的状态。
在此基础上,更新方程结合实际测量值对预测进行校正,以获得更接近真实状态的最优估计。整个过程体现了贝叶斯理论中先验知识与后验数据的结合。推导卡尔曼滤波器的过程其实就是在寻找最优线性无偏估计器(LUE)的解。通过设定状态估计误差的均方根最小化目标,可以得到一个闭式解,即卡尔曼增益。该增益决定了预测和测量结果在最终估计中的权重分配。简单推导时,可以先考虑一维线性系统,假设系统状态和观测分别为标量变量,引入预测方程并定义误差协方差,从而通过最小误差平方和原理求解出增益表达式。
扩展到多维情形时,状态、观测、协方差均转为矩阵形式,推导过程本质相同,不过需要涉及矩阵运算。这种推导方式不仅加深了对卡尔曼滤波器算法的理解,也能帮助开发者在实际应用中更灵活调整滤波参数,提升滤波效果。卡尔曼滤波器的优越性在于其递归计算特性,既避免了全局信息存储的需求,也显著降低了计算复杂度,适合实时嵌入式系统。此外,通过调整过程噪声和测量噪声的协方差矩阵,可以优化滤波器对系统不确定性的响应,实现导航系统的精准定位或金融时间序列的高效预测。随着非线性系统需求的增加,扩展卡尔曼滤波(EKF)及无迹卡尔曼滤波(UKF)被提出,用于处理非线性模型,通过线性化或采样方法提升估计效果。尽管复杂度有所增加,但核心理念依然源于卡尔曼滤波的基本框架。
总的来说,卡尔曼滤波器作为连接理论与实践的桥梁,凭借其坚实的数学基础和强大的实际应用,成为现代智能系统不可或缺的关键技术。通过简单推导和系统理解,能够帮助研究人员与工程师更深入把握其精髓,推动更多复杂系统的创新与发展。