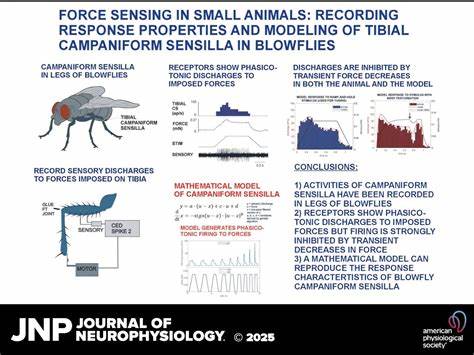
在自然界中,昆虫以其迷你体型和灵巧的动作闻名,而它们如何感知和应对环境中的机械力,长期以来一直是科学研究的谜题。最近,一项由美国马歇尔大学和西弗吉尼亚大学联合开展的生物力学研究,为我们揭示了吹蝇(学名Calliphora vicina)等微小昆虫如何通过腿部的特殊感受器来检测机械力的复杂机制。该研究不仅丰富了我们对昆虫运动神经生理的理解,也为仿生机器人技术的发展提供了全新灵感,预示着未来机器人在复杂环境中实现更稳定和适应性更强的步态控制。研究团队聚焦于昆虫后腿胫节中的钟状感受器(campaniform sensilla),这些传感器能够感应棘细胞中的机械应变,是昆虫体感系统中关键的力觉元件。通过精密的电生理记录,研究人员发现这些感受器对外力的强度及其变化速率极为敏感。在昆虫的正常姿势调整和行走过程中,即使是极微小的力发生波动,这些感受器都能迅速响应,其中险些短暂减弱的力分量尤为明显地抑制了感受器的神经发放。
这一发现挑战了此前认为微型昆虫对力的响应主要关注于力的绝对大小的观点,显示出力的动态变化对昆虫感知同样重要。生物医学科学教授Sasha Zill在研究中指出,感知机械力的能力对于维持昆虫的平衡及协调运动至关重要。吹蝇等重量极轻的昆虫为何依然需复杂的力觉系统,正是因为在快速且精细的动作过程中,感知力的动态变化能够帮助它们实时调整肌肉控制,确保身体姿态的稳定和运动的流畅。研究还强调了钟状感受器的响应特征存在滞后现象(hysteresis),这表明感受器对过去力环境的记忆影响了当前的神经输出,体现了生物体在力觉信号处理中的时间依赖性和复杂调节机制。借助数学模型,研究人员成功复现了这种感受器的电生理响应模式,模型基于更大型昆虫的力觉系统进行了调整,结果验证了力觉感知的普适性和可扩展性。这不仅为基础神经生物学提供了理论支持,更为仿生学和机器人学开拓了创新路径。
通过模拟真实昆虫感受器对力和其变化率的双重敏感特征,工程师们能够设计出更灵敏、更智能的力觉传感器,使机器人步态控制更加稳定,适应复杂地形的能力得到极大提升。这一点对于发展未来全地形行走机器人尤为关键,尤其是在灾害救援、环境监测等领域,灵巧且精准的力觉反馈系统将极大增强机器人自主行动的安全性和效率。此外,此次研究的跨学科协作模式也展现了现代科学研究的典范。生物医学、生物力学与机械航空工程的专家共同深入探讨微观力学感知机制,不仅促进了基础生物学知识的突破,也有效推动了工程技术的跨界融合。此前在大型昆虫和哺乳类动物身上得到验证的力觉感应机制,在微型昆虫体内同样适用,说明自然界采用了类似的生物力学策略来解决运动协调和机体平衡的问题,这种普适性为未来仿生感知系统的设计奠定了坚实的生物学基础。昆虫的体重极轻,运动环境复杂多变,能够迅速感知并反馈机械力的机制,也启示我们在微型传感器和微型机器人领域探索更高效、更稳定的数据采集和处理方法。
当前,机器人研究领域正面临着传感器体积小型化与性能提升的双重挑战,掌握昆虫钟状感受器的力感知原理,有望打破现有技术瓶颈,推动智能机器人更加接近生物体的感知与运动控制水平。未来,结合人工智能的力量,基于这一生物力学模型的仿生传感系统将能够实现自主学习和环境适应,不仅能够应对复杂动态的地形变化,还可以实时调整运动策略,显著提升机器人的操作灵活性和安全系数。此外,这些研究成果还对于理解其他小型动物如何应对外界机械刺激提供了理论借鉴。除了昆虫,许多微小生物在摄取环境信息和运动控制方面,其感知系统都遵循类似的力觉信号处理框架,揭示了动物界在机械感受方面的演化智慧。本文研究不仅扩展了神经生理学领域对感觉器官功能的认知深度,也为材料科学及纳米技术中开发新型敏感元件指明了方向。随着技术的进步,未来融合生物力学机制设计的微型传感器将可能广泛应用于医疗设备、智能假肢及各种自动化控制系统,极大提升设备的敏感度和响应速度,为人类生活质量改善带来深远影响。
综上所述,微小昆虫通过后腿胫节中的钟状感受器实现对外力的精准感知机制为生物力学研究提供了宝贵的数据支持和理论基础。此发现不仅深化了我们对生命体感知系统的理解,也推动了高性能仿生机器人和灵敏传感器的创新发展。微观生物系统中力觉机制的解析,是连接自然智慧与现代工程技术的桥梁,展现了生物学与机械工程融合创新的巨大潜力。随着未来研究的不断深入,相信我们将在更多生物体感知秘密中发掘启示,进一步促进智能设备与机器人的进步,为科学技术发展和产业应用开辟新天地。