随着全球城市交通日益复杂和出行需求不断增长,智能导航工具的作用变得愈发重要。尤其是为鼓励环保出行和缓解高峰期交通拥堵,许多城市都设立了高乘员车专用车道(简称HOV车道),专供搭载多人的车辆使用。这些车道通常速度更快,能够有效提升通勤效率。然而,传统导航系统在预计到达时间(ETA)的计算中,往往忽视了HOV车道的特殊性,导致数据不够精准,用户体验不佳。谷歌地图近期创新推出高乘员车专属ETA,通过先进的分类技术和数据模型,精准预测包括HOV车道在内的行程时间,为用户提供更优质的导航服务,成为推动智慧出行的重要一环。谷歌研究团队通过深入分析汽配交通数据,基于匿名且聚合的车辆行驶轨迹,设计出了一套独特的分类算法以区分高乘员车行驶的路线与普通车辆路径,成为该项目的核心技术。
高乘员车车道因其速度快、通行效率高,尤其在高峰期表现突出。例如,盐湖谷地的数据显示,高乘员车车道的平均速度达68.18英里/小时,而普通车道仅为58.60英里/小时,速度差超过16%。这种速度优势使得导航系统需要针对不同车道的速度模式做差异化处理,提升ETA的准确性。实现这一目标的第一步是对过去的高乘员车辆行驶时间进行推断,团队利用机器学习模型训练道路段的ETA预测,对HOV车道进行独立建模。然则仅凭速度信息难以有效区分是否为高乘员车辆行驶,特别在交通流量较少或数据相近时,误判风险较大。为此,团队采用无监督学习的方式,对车辆在特定路段及时间窗口内的行驶片段进行分类,无需事先标记数据。
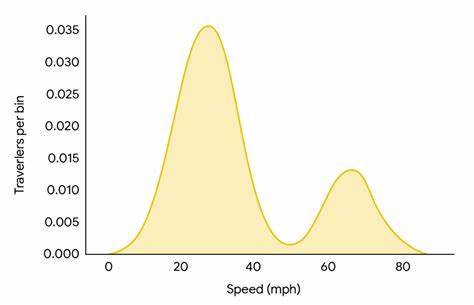
具体而言,研究人员将行程拆分为多个路段部分,通过分析同一时间片段内多辆车的数据集合,结合速度、GPS定位的横向距离等多维特征,进行细粒度判断。速度成为判断的重要维度,在交通拥堵时,速度分布呈明显的双峰态,这意味着存在两种截然不同的交通模式——高乘员车道车辆较快,普通车道车辆较慢,这种状态下分类准确率很高。以西雅图I5高速公路为例,下午4点到4点半间,HOV车道车辆的速度远高于普通车道,明显体现出双峰速度分布。这被称为情景A。然而,另一种情景B则表现为速度差异较小,HOV车道仍比普通车道快,但幅度有限,导致区分难度增大。为了克服GPS定位本身带来的误差,团队引入了估计的车辆横向位置特征,尽管存在一定噪声,但结合速度数据能够提高模型的判别能力。
利用车辆相对于车道中心线的横向距离,辅助判断车辆是否行驶在专用车道,从而增强分类系统的鲁棒性。当速度与横向距离两种数据结合应用时,即便速度差异不大,模型仍可利用车辆轨迹的空间特征,提高分类准确率。考虑到不同时段交通状况的变化,模型采用时间加权的软聚类技术,在对车辆行程单个路段数据进行分类时,同时参考近期时间窗口内的其他观测数据,赋予数据不同的权重,优先考虑更接近当前时间的观测信息。这种动态权重处理不仅提升了统计样本的可靠性,也使模型更好地适应交通流的时变特性。软聚类方法则赋予数据点属于某一类别的概率,使系统能够灵活处理边界模糊的样本,避免硬分类可能带来的误判风险。在完成多个路段的分类后,通过综合不同路段的概率分布,计算整段行程的高乘员车比例,作为最终路径是否为HOV路径的判定标准。
为进一步增强分类效果,团队引入了专家混合模型(MoE),融合多种参数配置的分类器输出,以多数投票方式得出更加稳健的结论。对于模型的评估,研究人员设计了严格的实验,通过对不同路段长度的行程数据进行分析,建立包含两种正态分布的双峰模型,分别对应普通车道和高乘员车道的速度分布。利用Z分数测量单次行程速度与两类速度分布的吻合度,筛选出高置信度的HOV与非HOV标签进行算法效果验证。实验证明,采用高乘员车专属ETA功能后,整体ETA预测准确率提升了75%,显著缩小了高乘员车辆与普通车辆预测精度的差距。相较于初步仅考虑速度的模型,此方法带来了18%的性能提升。这一创新不仅提高了导航服务的可靠性,也响应了绿色出行理念,鼓励更多人采用拼车、电动车及公共交通等可持续的出行方式。
未来,该模型中的许多技术与思路并不限于高乘员车通行情境,对于其他具备专用车道的交通模式同样适用。例如,在骑行及电动两轮车日益盛行的地区,这一方法有潜力扩展至识别和优化二轮交通路径。谷歌地图借助机器学习、数据挖掘与交通工程知识的深度融合,打破了高质量HOV数据稀缺的瓶颈,建立了动态且精准的道路流量模型,助力用户在拥堵道路中找到更快捷的路线,降低出行时间与碳排放。该技术的成功应用为智能交通和城市规划提供了有力工具,未来有望持续推动数字交通体系向更高智能化、绿色低碳发展迈进。谷歌研究团队感谢相关合作伙伴的支持与贡献,项目的成功离不开各领域专家的协作努力与创新精神。谷歌地图的这一突破,既满足了用户对精准导航的诉求,也为城市交通管理带来数据支持,助力构建智慧出行生态圈。
随着技术不断进步和数据积累,预计高乘员车及多样化交通模式的ETA功能将更加完善,助力全球用户实现安全、高效、环保的出行。









