随着微纳米技术的不断发展,精密位移与操作设备的重要性日益凸显。3D打印技术的兴起为柔性微操纵器的制造带来了革命性的变革,打破了传统制造对材料和工艺的限制,使得这类装置能够以更低的成本和更高的灵活性实现精密控制。柔性微操纵器通过集成一体化的平行运动机构与柔性铰链,不仅提高了机械刚度,还确保了微米级的定位精度。这种设计理念既借鉴了传统机械结构的稳定性,也充分利用3D打印带来的复杂结构制造能力,使得设备结构紧凑、重量轻便,适合多种实验与工业应用。3D打印柔性微操纵器项目采用开源理念,所有CAD文件均基于免费且开放的设计软件FreeCAD制作,方便用户进行查看与修改,降低了入门门槛并推动了社区协作发展。在参数设置方面,针对0.4毫米喷嘴和PLA材料优化设计,保证了零部件在打印过程中的成型质量。
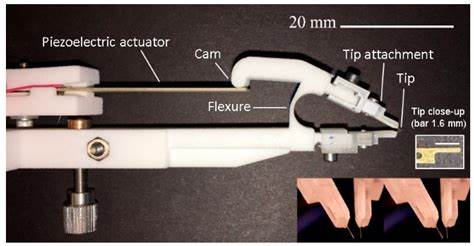
部分重要部件如WireMount与FlexureStiffener需采用较慢的打印速度与细致的层厚,确保其柔性特性与机械强度之间的平衡。整体打印流程简化且易于复制,支持快速迭代与个性化设计调整。结构上,该微操纵器采用XYZ三自由度平台,适合多维精密控制。通过并联运动学结构,实现定位时的高刚度和稳定性,并有效抑制外界震动对测量精度的干扰。柔性铰链构件则以微米级变形实现运动转换,摒弃了传统机械铰链的摩擦与间隙问题,提升了操作的平顺性和响应速度。除机械设计外,该项目还配备了相关的软件工具,方便用户进行运动路径规划与数据采集,提高实验操作的自动化程度。
该平台特别适合光学对准、微电子探针及显微成像等领域。由于其低成本及模块化设计,使得科研人员能够以有限的预算获取高性能实验设备,突破传统设备的经济与技术壁垒。其柔性结构特别适合光纤对齐等需要纳米级精度的场合,进一步扩展了其科研应用边界。此外,通过搭配不同的末端执行器,可以实现从精密抓取到微操作的多样化任务。这个特性使其在生物医学工程、微机械装配等新兴领域同样具备广阔潜力。柔性微操纵器的设计灵感部分源自其它开源柔性平台,如开源的OpenFlexure Block Stage,推动了全球学术界与工业界对开放协作模式的重视。
对比之下,3D打印柔性微操纵器不仅继承了这些设计的优点,更因应用户需求进行了功能优化,提升了可制造性与适用性。尽管如此,项目仍面临若干技术挑战。包括如何进一步提升柔性铰链的疲劳寿命、优化O形圈预加载机制以增强运动稳定性,以及改进曲柄轮的安装方式减少机械摆动。这些问题的解决将直接关系到设备的可靠性和性能表现。未来,结合更先进的打印材料以及智能控制技术,柔性微操纵器有望实现更高的精度、更长的使用寿命和更加自动化的操作。同时,设计上的模块化和多功能化也将使其适用范围大幅拓展。
社会主义开源社区的积极参与,推动各类附件与夹具的开发,让设备的应用场景不断丰富。3D打印柔性微操纵器代表着精密微操作领域的一场创新风暴。它融合了现代制造技术和开放设计理念,实现了一种低成本、高精度的解决方案,极大地促进了科学研究和工业生产的效率提升。随着制造工艺和材料科技的进步,其市场潜力和应用价值必将不断释放,为光学、电子、生物等多个领域带来深刻变革。对未来科研工作者和开发者而言,深入探索和贡献该项目不仅有助于提升专业技能,更能为全球微操作设备的发展贡献力量。