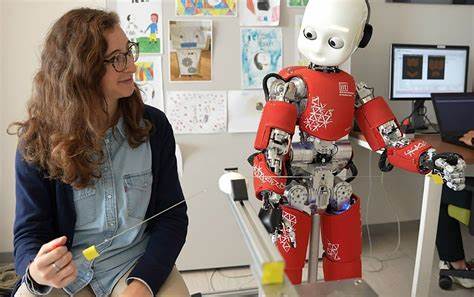
随着人工智能技术的飞速发展,机器人在生活和工业中的应用日益广泛。作为谷歌最新推出的视觉语言模型,Gemini Robotics-ER 1.5以其强大的代理能力和空间理解优势,成为机器人智能领域的里程碑。该模型不仅能够识别复杂的视觉信息,还能理解自然语言指令,实现多步骤任务的精准执行,彻底改变了机器人与人类互动的方式。 Gemini Robotics-ER 1.5采用先进的视觉语言模型架构,结合了图像、视频和语言输入,使机器人可以像人类一样感知环境、分析场景并作出推理。这种跨模态的融合赋予机器人强大的环境适应能力,让它们能够在开放且动态的环境中自主决策和执行任务。比如,机器人能够识别场景中不同对象的位置和属性,理解它们之间的空间关系,并根据自然语言指令分解任务,规划实现路径,极大地提高了任务完成的效率和准确性。
在实际应用中,Gemini Robotics-ER 1.5支持使用标准编程接口调用,实现与现有机器人控制系统的无缝集成。其提供了丰富的功能,包括检测并定位图像和视频中的物体,追踪动态对象,生成操作轨迹,以及执行复杂的上下文推理。这些能力使机器人不仅能完成基础的物体识别和移动,还能规划多步骤任务,如拣选、搬运及空间调整等复杂操作。比如,当用户发出"把蓝色积木放入橙色碗中"的指令时,模型能够自动定位相关物体,计算空间位置,规划运动路径,最终完成精确的抓取和放置动作。 Gemini Robotics-ER 1.5特别注重自然语言交互体验,使机器人能以更直观友好的方式接受复杂任务指令。用户可以通过日常用语描述需求,模型自动将其拆解成具体的执行步骤。
这种基于语言的任务编排不仅降低了操作门槛,还赋予机器人更高的灵活性,适应多变的实际工作场景。更重要的是,该系统允许机器人调用内置或第三方工具执行函数,甚至生成和运行代码,进一步扩展其智能执行能力,满足多样化需求。 在性能调控方面,Gemini Robotics-ER 1.5引入了"思考预算"机制,用户可根据具体场景需求调整计算资源和响应速度的平衡。对于简单的物体定位任务,可以设置较低的思考预算,以获得快速反馈;而在涉及复杂空间推理或多步骤规划时,则可提高预算以提升准确性和逻辑性。这种灵活的资源管理不仅优化了模型响应效率,也降低了实际应用中的计算成本。 安全性始终是机器人应用的重要考量。
Gemini Robotics-ER 1.5构建时充分考虑了安全性设计,强调在使用过程中人为保持环境的安全和对模型输出的监督。鉴于生成式AI模型偶尔存在"幻觉"现象,可能输出错误信息,用户需合理把控机器人活动范围和操作指令,规避潜在风险。目前谷歌深度智能团队持续进行相关安全研究,致力于提升机器人与AI结合的稳定性和可控性。 Gemini Robotics-ER 1.5广泛适用于各类智能机器人场景。例如,在制造业中,机器人可实现精准的物料识别和搬运,协助流水线自动化;在仓储物流领域,基于视觉和语言理解优化路径规划,提高作业效率;在服务机器人中,支持与人类自然交流,完成定制化任务,如物品搜寻与辅助收纳。尤其是在复杂动态环境中,该模型具备强大的适应性和决策能力,为智能机器人的普及和多样应用奠定坚实基础。
该模型还支持对图像和视频的追踪分析,能够连续监测目标状态,实现运动轨迹的规划与调整。这一功能对于移动机器人实现自主导航、避障规划等至关重要。结合代码执行能力,机器人可以借助模型智能动态调整感知范围与操作精度,例如缩放镜头聚焦目标,进一步提升环境感知的细腻程度。 面向开发者,Gemini Robotics-ER 1.5提供了丰富的示例代码和API接口文档,通过Google AI Studio平台便捷实现模型调用和测试。相关的机器人开发手册和案例库涵盖了从基本物体识别到复杂多任务调度的完整流程,帮助开发者快速构建定制化智能机器人应用。基于开源和模块化设计,开发者可灵活组合模型能力,拓展更多创新使用场景。
在未来的发展里,Gemini Robotics-ER 1.5不断迭代升级,持续增强其复杂推理和环境理解能力。预期随着模型精度的提升及异构交互技术的融合,机器人将更好地实现感知决策闭环,在医疗辅助、教育机器人、智能家居等领域发挥更大作用。与此同时,研究人员也致力于推动模型在低延迟、低功耗设备上的应用,确保机器人智能能够普及到更多实际场景和终端设备。 综上所述,Gemini Robotics-ER 1.5代表了机器人智能感知与自然语言交互领域的最新突破。它融合了视觉理解、空间推理、语言交互及任务编排等多重能力,赋能机器人在复杂现实环境中实现自主、高效且安全的操作。随着技术的不断成熟和应用范围的扩展,Gemini Robotics-ER 1.5将助力构建更加智慧、灵活和人性化的机器人生态,推动智能制造与服务自动化的新纪元。
。