随着人工智能和机器人技术的飞速发展,机器人已经逐渐进入日常生活和各种工作场景中。机器人不仅仅作为工具存在,更成为人类的合作伙伴。在这一背景下,人与机器人如何协作、相互影响成为科学研究的重要方向。最近的研究揭示,人与机器人协作时,人类的空间注意力会出现一定的偏向性。这种现象不仅影响人类的感知,也对工作效率和安全提出新的挑战和机遇。空间注意力是指个体对空间环境中特定位置的注意力分配能力,直接关系到人类感知、反应和决策的有效性。
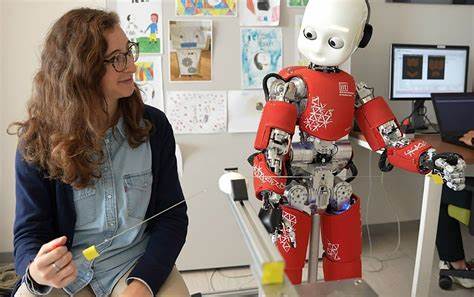
在人与机器人协同工作时,机器人动作、位置以及互动方式都可能影响人的空间注意力分布。研究表明,当人与机器人共同执行任务时,人类会将更多的注意力集中在机器人操作的空间区域,从而出现空间注意力的倾斜。这种偏向性意味着人类在机器人所在空间的感知优势增强,而对其他空间区域的关注可能相应减少。原因之一是机器人在协作中的动作和行为会吸引人类的视线和认知资源。机器人执行动作时往往具有较大的运动轨迹和明显的行为模式,使人类自然地将注意力集中于机器人身边。除此之外,人类往往对机器人动态表现出高度的监控欲望,期待及时了解机器人状态以保持协作的流畅性。
另一方面,这种空间注意力的偏向可能带来潜在风险。由于注意力资源有限,过度关注机器人操作区域可能导致对周围环境的忽视,增大发生意外的可能性。例如,在工业生产线中,人类操作员若过度关注机器人活动区域,可能无法及时察觉其他设备异常或安全隐患。因此,理解并正确引导人与机器人协作中的空间注意力具有实际意义。为了优化协作效果,设计合理的人机交互界面至关重要。合理的视觉提示和声音提示可以帮助人类更均衡地分配视觉和注意力资源,避免因偏向性过强而导致的忽视问题。
与此同时,机器人的运动路径规划也应考虑人类注意力的分布规律。通过调整机器人的活动轨迹,使其动作更加自然流畅,减少对人类注意力的过度抢占,可以提升协作的协调性和安全性。此外,训练和教育也是应对空间注意力偏向问题的有效手段。通过专业培训,使人类协作人员意识到自身注意力可能出现的偏差,掌握更科学的注视和监控策略,有助于提升整体协作性能。未来,随着机器人在医疗、教育、服务等多个领域的普及,理解人与机器人之间的空间注意力相互作用变得更加重要。深入研究这种偏向性不仅有助于推动机器人设计的优化,同时还能够促进人类认知科学的发展,促进人机关系的和谐发展。
值得关注的是,空间注意力的偏向不完全是消极现象。在某些情境下,偏向性有助于工作人员快速关注关键区域,提高任务执行的准确性和效率。例如,在危险环境中,强调对机器人操作区域的注意,有助于预防事故,保障人员安全。因此,在设计人机协作系统时,应结合具体应用场景,灵活调整空间注意力的分布策略,使其发挥最大积极作用。总的来看,人与机器人协作导致的人类空间注意力偏向现象为未来科学研究和实际应用提供了丰富的思考维度。通过技术创新与认知策略结合,可以打造更加高效、安全且智能化的协作环境。
实现人与机器人间的深度融合,促进协作效率的提升,是当下及未来科技发展的重要目标。随着研究的深入,相信我们将更加清晰地理解人机互动的认知机制,为机器人技术的发展和社会应用注入新的动力和智慧。 。