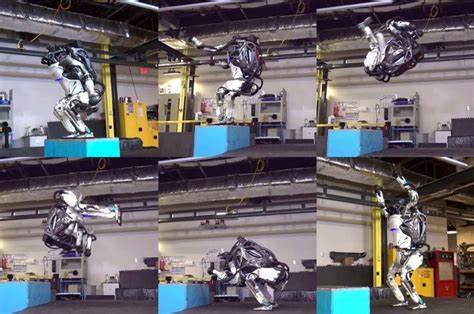
波士顿动力的Atlas机器人自诞生以来一直是机器人技术领域的标杆,其卓越的运动能力和复杂的动作执行使其成为全球关注的焦点。最近,Atlas机器人成功完成了一次令人震撼的后空翻动作,这不仅展示了其高度的机械协调性和精准的动作控制,也彰显了现代机器人技术实现动态平衡和运动规划的巨大进步。后空翻动作需要机器人拥有极佳的平衡感、强大的动力系统以及精确的姿态调整能力。Atlas通过结合先进的传感器系统、深度学习算法和复杂的动力学模型,实现了这一极具挑战性的动作。机器人在空中完成翻转同时,精准地计算重心变化与力矩分布,确保着陆时的稳定和安全。Atlas的软硬件协同设计尤为关键。
其柔性关节和强劲的伺服电机赋予机器人快速响应和细腻动作控制能力。多传感器融合技术实时监测环境变化及机器人自身状态,确保每次动作调整及时准确。补偿算法则帮助机器人克服外部扰动,使动作流畅自然。后空翻的教学过程为机器人学习复杂运动提供了宝贵的案例。通过强化学习算法和模拟训练,Atlas不断优化动作轨迹,提升执行效率和稳定性。该过程强调动作分解,将复杂翻转拆解为多个阶段,通过逐步调整实现完整动作的完美呈现。
此举不仅丰富了机器人运动学研究,也为人工智能与机械工程的融合提供了新的视角。从产业应用角度看,Atlas的动态动作能力对灾难救援、工业自动化及服务机器人领域具有重要意义。能够灵活地在复杂环境中移动、跳跃甚至翻滚,赋予机器人更强的适应能力和应急反应能力。未来,这类技术的推广将推动机器人参与更多危险环境的任务,提升作业安全性和效率。波士顿动力不断挑战机器人运动极限,其后空翻动作是技术积累和创新的结晶。此成果反映了机器人自主运动规划、感知融合及人机交互技术的飞跃。
随着硬件性能提升和算法优化,未来机器人将在多样场景中展现出更丰富、更自然的运动形态。总结来看,Atlas机器人完成后空翻不仅是一项技术壮举,更为机器人学科发展树立了新标杆。它展示了机械设计与人工智能融合的强大潜力,推动人们重新定义机器人能力上限。其教学经验和技术方法也为机器人研发者提供了重要启示,有助于加速下一代机器人技术的创新与应用。随着机器人自主动作能力的不断增强,人类在工业、医疗、服务等各领域的协作与生活方式必将迎来变革。波士顿动力的Atlas机器人后空翻,不仅展示了一个动作,更描绘了机器人技术的未来图景,激励全行业持续探索与突破。
。