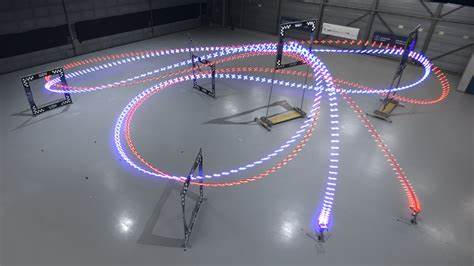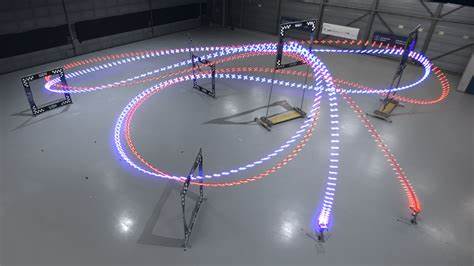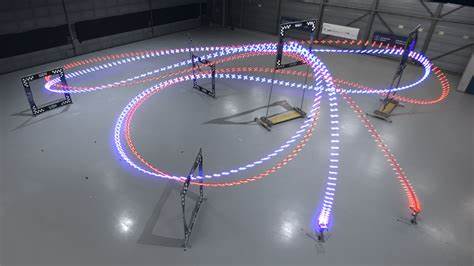
无人机竞速作为一项集速度、精准与技术于一体的极限运动,近年来迅速风靡全球。传统上,这项运动依赖高超的人工操控能力,顶级竞速飞手穿戴第一视角(FPV)头盔,通过无人机搭载的摄像头实时传输画面,精准控制无人机穿越复杂多变的三维赛道。然而,如何使机器自主达到甚至超越人类顶尖飞手的水平,一直是无人机自主飞行领域的巨大挑战。2023年,一项以深度强化学习为核心的突破性成果揭开了无人机竞速的新篇章,该系统名为Swift,标志着人工智能在物理竞技层面的重大里程碑。 Swift系统核心优势在于它仅依靠机载传感器和计算能力,能完成与人类世界冠军等同甚至更优的竞速表现。无人机竞速环境充满高速度、高加速度、动态变化和不确定性,飞行器要在瞬间做出精准的决策调整,保持连续且高速地通过七个指定航点构成的赛道。
相比于先前依赖外部运动捕捉设备或高度理想化状态估计的研究,Swift完全自主飞行且无外界辅助,真实模拟人类飞手感知限制,使得成果更富实用价值与挑战性。 实现这一目标的关键在于深度强化学习(Deep Reinforcement Learning,DRL)的巧妙应用。通过大量在仿真环境中的训练,Swift的控制策略不断优化,以最大化通关速度和安全性。强化学习方法使得无人机能够在不断试错中学习最优飞行路径和机动技巧,兼顾高效推进与稳健感知,这种策略的训练超越了传统基于模型的控制与路径规划方法的限制。特别是,Swift使用的是模型无关的、基于“策略优化”的深度神经网络,使其具备极强的泛化能力和应对复杂环境的适应性。 为了缩小仿真环境与现实世界的差距,研究团队采用了独具创新的数据驱动残差模型,将真实环境中无人机的传感器噪声和动力学误差嵌入仿真训练过程。
这种方式打破了以往训练与部署环境不匹配产生的性能滑坡问题,极大提升了策略在真实无人机上的迁移效率和表现。特别是在视觉惯性里程计(VIO)漂移、运动模糊、气动力复杂性的影响下,Swift依然能保持极佳控制精度和反应速度。 Swift系统由两大模块构成:感知系统和控制策略。感知模块利用机载摄像头和惯性测量单元(IMU)联合估计无人机状态,结合基于卷积神经网络的赛道门框角检测,实现精准的三维定位和航点识别。该系统采用卡尔曼滤波融合视觉与惯性数据,有效抑制噪声与漂移,使得无人机能动态调整飞行姿态。控制策略部分则由两层感知的神经网络驱动,通过反馈的状态估计输出质量极高的推力和角速度指令,直接驱动无人机飞行动作。
在速度与反应时间方面,Swift表现出超过人类的优势。其感知反馈时延约为40毫秒,远低于人类飞手平均220毫秒的神经反应时间。此外,Swift启动反应更快,能够实现比人类更激进且紧凑的飞行轨迹,尤其是在赛道关键难点如“Split-S”急转弯处,展现出超凡的机动能力和轨迹优化,缩短了过弯时间。值得关注的是,Swift虽不如人类那般依赖目视持续关注下一赛点,但通过综合惯性和视觉信息稳定飞行,使其在不牺牲安全的前提下实现高速高效飞行。 在实际竞赛中,Swift与包括2019年无人机竞速联盟世界冠军Alex Vanover等三位世界顶级飞手展开多场对决。比赛规则严格且公平,无人机硬件配置完全一致。
经过多轮较量,Swift多次胜出,还刷新了赛道最快纪录,标志着其系统整体实力已达到顶尖人类飞手水平。这不仅在技术层面突破自主无人机的能力边界,更具象征性意义,预示着智能机器人在竞技体育和复杂运动控制领域的全新可能。 这种基于深度强化学习的无人机竞速技术,有望在未来广泛应用于自动驾驶车辆的高速操控、应急救援中的快速自主飞行及工业领域对高速精准作业的需求。此外,它还鞭策了如何通过混合学习策略融合现实世界经验数据与仿真训练的研究方向,为提升人工智能现实环境适应性提供了范式借鉴。 虽然Swift在诸多方面表现优异,但人类飞手的感知灵活性和对环境变化的抗干扰能力仍然不可忽视。当前系统面临对环境外观变化(如光照和复杂背景)的鲁棒性限制,尚需进一步提升模型在多样化场景下持续稳定感知的能力。
此外,Swift尚未设计针对碰撞后快速恢复的策略,这也是人类飞手展现持久竞技能力的重要因素。未来改进可通过引入多样化数据训练和增强系统的容错与灾难恢复功能,以提升整体系统的实战竞争力。 综合来看,2023年Swift的诞生不仅在无人机竞速领域树立了AI自主系统的新标杆,更揭示了深度强化学习结合数据驱动实体模型的巨大潜力。随着传感器性能提升及计算资源优化,基于强化学习的高动态无人系统必将成为智能自主飞行的中坚力量,助力实现更广泛、更高效的现实应用场景。未来,融合模拟训练和现实反馈的混合学习模式、端到端感知与决策的深度策略优化,将持续推动无人机及其他移动机器人在速度、灵活度和智能决策上的极限突破,开启智能竞技运动新时代。