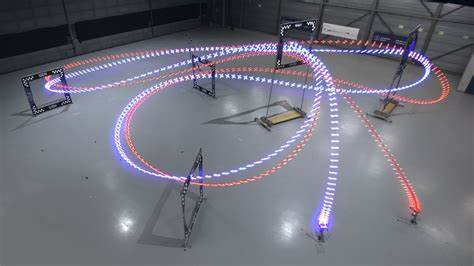
无人机竞速作为一项结合速度、精准操控与实时决策的高难度运动,近年来凭借其极具观赏性的比赛形式和技术挑战吸引了众多关注。尤其是在2023年,一项基于深度强化学习的自主飞行系统――Swift的问世,彻底改写了无人机竞速的竞技格局,让机器人实现了与人类世界冠军平起平坐甚至超越的里程碑。这一创新不仅展现了人工智能在实际物理环境中的强大能力,也为未来智能移动机器人在复杂任务中的应用提供了重要启示和全新思路。 全景式无人机竞速的挑战在于高速三维空间中的精细控制,竞速者通过机载摄像头以第一人称视角体验飞行,实时捕捉赛道信息并快速反应。对于自主无人机来说,如何仅依赖机载传感器准确估计位置、速度及环境状态,并在物理极限条件下完成飞行,是亟需攻克的难题。Swift系统正是在解决这一核心瓶颈中取得了突破。
其采用了深度强化学习与真实世界数据混合训练的方法,克服了从仿真到现实的迁移挑战,实现了卓越的飞行表现。 深度强化学习在过去几年内已经取得了游戏领域的重大突破,从Atari游戏到围棋,再到复杂的竞技游戏如星际争霸和Dota 2,人工智能展现出了超越人类的策略规划能力。然而,这些多属于虚拟仿真环境,在可控且完全确定的条件下开展训练。将此类技术成功引入现实世界,尤其是无人机这样高度动态、环境复杂且传感器易受限的系统,意味着需要同时处理感知误差、动力学不确定性以及传感器延迟等问题。 Swift系统核心架构由两个关键部分组成:感知模块和控制策略模块。感知系统融合视觉和惯性测量单元(IMU)的信息,使用视觉惯性里程计(VIO)结合神经网络门检测器对环境进行低维度状态估计。
通过卡尔曼滤波器融合多重信息,提供准确的无人机全球位姿估计。控制策略则依托深度强化学习训练的前馈神经网络,直接将感知模块输出的状态映射为无人机的推力与机身角速度指令,实现高频率且动态稳定的飞行控制。 在训练过程中,Swift采用了基于模型无关的深度RL算法,通过在保真度极高的仿真环境中反复交互学习任务完成策略。为了确保仿真与现实间的良好迁移,团队引入了真实飞行采集的数据驱动残差模型,这些模型精准捕捉了感知噪声和动力学未建模部分,嵌入仿真系统中进行策略微调。这样的混合学习框架赋予系统更强的鲁棒性,应对现实世界固有的非理想因素。 比赛现场设立了专业无人机竞速赛道,由顶级人类选手设计并亲自试飞,为系统评估提供了严苛环境。
Swift与三位世界级人类冠军展开多场一对一竞速,结果显示该自主系统不仅赢得多数比赛,更在纪录时间上刷新了人类飞手的最高水平。分析其飞行动作细节,Swift在赛道起步反应速度、狭窄转弯处的轨迹规划均表现优异,体现出强化学习在长远轨迹优化上的优势。相比之下,人类飞手更依赖视觉保持下一个门圈的视野,而Swift则结合惯性信息与视觉里程计多重证据,展现了多模态融合的智能感知。 无人机竞速极端的物理条件,如高速、强加速度和复杂空间环境,对飞控系统要求极高。Swift通过搭载与人类使用相同硬件的无人机,并使用实时处理的低延迟感知控制模式,实现了策略执行的高效与精确。其感知模块以每秒100帧的惯性测量数据与30帧的视觉信息紧密配合,同时控制延迟仅40毫秒,显著低于人类飞手的平均响应时间220毫秒,这为赢得宝贵的时间差奠定了基础。
尽管取得了辉煌成就,Swift系统仍面对一定局限。例如,其对环境外观连续性的依赖使得光照、赛道外观变化可能引发感知失败。而人类飞手则凭借丰富的经验和适应能力,在光照及环境变化下仍能稳定发挥。未来的改进方向聚焦于增强感知系统的多样性训练和泛化能力,以及设计可恢复能力更强的控制策略,以应对崩溃后的飞行恢复和未知的场景挑战。 Swift核心竞技优势不仅在于其学习能力,还在于融合了数据驱动与物理建模的混合方法。详细的空气动力学模型、准确的电池和电调行为模拟、真实电机响应特征等都被系统地整合至训练仿真环境,极大提升了训练所得策略对真实世界的适用性。
这种从虚拟到现实的无缝迁移代表了机器人学领域在应用人工智能的又一跃进。 无人机竞速作为技术密集型且高风险的领域,成功推进自主飞行技术,具有深远的工业和科研意义。Swift的成功展示了深度强化学习赋能高动态、高复杂度机器人控制的强大潜力,未来有望推广至自动驾驶车辆、空中物流运输、灾害监测救援等更多实际场景。此外,这种结合仿真训练与真实数据细化的策略,也为其它移动机器人系统提供了宝贵借鉴。 三位参赛车手纷纷对比赛发表感想,表达了对自主飞行系统惊人成果的认可及对未来潜力的期待。既讴歌了机器在持续、高强度表现上的优势,也提出了对人机竞速关系的深刻思考与竞赛精神的传承。
回望无人机自主竞速的发展历程,从早期基于传统规划和控制的尝试到现阶段利用深度学习的跨越,体现了人工智能与移动机器人融合发展的巨大潜力。Swift案例显示,只有打破传统依赖外部定位和模型的桎梏,通过端到端感知决策学习,机器人才能真正挑战高性能运动极限,实现与人类竞争的品质和速度。 总结来看,2023年基于深度强化学习的Swift无人机竞速系统达到了前所未有的竞技水平,代表着人工智能应用于移动机器人控制的新时代。它不仅刷新了行业对自主系统能力的预期,也推动了研究者对机器人决策系统设计的深入思考,必将为未来智能系统开辟更广阔的创新空间。随着技术不断完善,自动驾驶飞行器在各类复杂任务中的应用将更加广泛,人机协作和竞速竞赛将迎来前所未有的发展机遇。