打哈欠,这一看似简单的生理行为,实际上却蕴含着复杂的社交信号和认知机制。长期以来,科学界已确认打哈欠具有传染性,尤其在灵长类动物和人类之间更为显著。这种现象不仅反映了生理层面的同步,也与共情、模仿以及社交联结密切相关。近期发表在《Scientific Reports》上的一项突破性研究进一步拓展了这一认识,揭示了黑猩猩在观察一个非生物体——人形机器人(Android)打哈欠时,也会产生模仿打哈欠的现象。该研究不仅挑战了对传染性打哈欠的传统理解,还为机器人和生物体之间的社交互动机制提供了新见解。黑猩猩作为人类最亲近的进化亲缘物种,其行为和认知模式具有极高的参考价值。
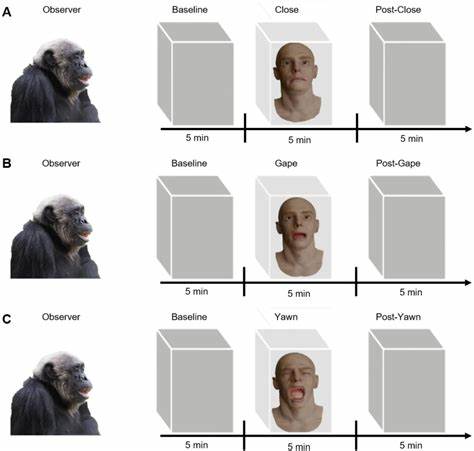
本研究针对14只成年黑猩猩,设计了一个拥有逼真面部动作的拟人机器人,该机器人通过机械伺服控制器模拟打哈欠、张嘴和闭嘴等面部表情,动作精准且时间控制严格。实验分为三个条件:机器人打哈欠、机器人假装张嘴但不打哈欠(控制动作)和机器人保持口闭不动。每个条件下,黑猩猩在固定时长内自由活动,并被摄像设备全方位观察记录其行为反应。结果显示,超过一半的黑猩猩在观察机器人真实打哈欠时表现出明显的传染性打哈欠行为,而在控制动作和闭嘴条件下则很少发生。研究还发现,在机器人打哈欠期间,黑猩猩更多地展示了与休息和嗜睡相关的行为,如躺卧、收集垫料和筑巢等。这一行为模式暗示打哈欠或许充当了一种环境信号,传递出休息或放松的社会信息,而不仅仅是简单的模仿反应。
鉴于机器人明显的机械部件和材料质感,这些黑猩猩仍对其人形面部表情产生强烈反应,表明表现形式的生物学真实感和动作时序在触发传染性打哈欠中发挥重要作用。此外,研究中控制了观察时间和观察角度等变量,确保实验结果的稳定性和有效性。传染性打哈欠的机制历来颇具争议,既有观点认为其根源于基本的镜像神经元系统和动作共鸣反应,也有理论将其与复杂的情感理解和共情能力密切联系。此次研究支持了两者可能同时作用的论点:机器人人形表现激活了黑猩猩的感知-动作联系网络,引发了非意识性的模仿,而随后的休息行为则展现了更高阶的语境理解和行为联结。更广泛地说,发现黑猩猩对非生物体面部表情的反应,揭示了社交认知的高度灵活性以及跨代理互动的潜力。这对未来人与机器人的互动设计提出了新要求,强调机器人外型的生物真实性和动作设计的重要性,以触发更多自然和富有情感的交互行为。
机械视觉的精细模拟不止满足了视觉上的真实感,更关键的是它激活了观察者内在的社交和认知机制。打哈欠作为一种传染性行为,其在生物个体间的传递传达了集体同步和情绪一致的社会功能。跨越物种和代理界限的传染效应,显示了这种行为背后的进化优势,有助于群体间的协调和安全,同时也是非语言情感传递的重要组成部分。研究同时提出一些未解之谜和未来方向,例如不同种类的机器人面部表现是否会产生不同的行为响应,黑猩猩与其他灵长类动物甚至不同社会结构动物之间传播机制的差异,以及长期暴露后对非生物智能体打哈欠的敏感度变化。除此之外,探讨机器人打哈欠是否会影响人类观察者、甚至在多物种环境中促使互动规则的新型形成,也具有深远的意义。该实验以严格的伦理标准执行,被观察的黑猩猩均社会化良好,避免任何隔离或压力诱发因素,确保数据反映真实自然行为。
实验设计巧妙利用对照条件,排除了动作幅度和注意力差异带来的混淆变量,提高了结论的可信度。综合来看,此研究在多个层面为打哈欠的社会传染性、情感共鸣机制及跨界互动提供了坚实的实证依据。黑猩猩对人形机器人的反应证明,社交认知远非单纯基于生物实体,而是对外部动作信息的高度敏感和灵活解读,为机器人设计和动物行为学开辟了全新的研究视角。它启示我们,随着人工智能和机器人技术的发展,未来人与非生物代理之间的社交互动将愈发丰富且复杂,而理解这些跨界互动的基础机制,正是促进和谐共处与协作的关键。









