随着劳动力成本上升和对高质量农产品的需求增长,草莓采摘机器人作为农业自动化的重要应用方向,正在迅速吸引科研机构与企业的关注。草莓具有果实小、果柄柔弱、果实颜色与叶片复杂背景相近等特点,给机器人视觉识别与机械柔性采摘带来挑战。本文从设计理念、核心技术、系统开发、田间试验与评价指标等方面,系统阐述草莓采摘机器人如何从实验室走向田间,并探讨推广应用的关键要点与未来发展方向。草莓采摘机器人设计的首要目标是实现可靠的果实检测与判别。机器视觉系统通常采用RGB相机、深度相机或多光谱相机相结合的方法,以提高在不同光照条件下的检测鲁棒性。深度信息能够帮助分割前景果实与背景叶片,减少误检;红绿蓝三通道组合或近红外波段有助于识别成熟度与果面缺陷。
近年来,基于深度学习的目标检测模型如YOLO、Mask R-CNN等在果实识别上取得显著进展,但在田间应用时需要考虑模型轻量化、推理速度与能耗,以及复杂遮挡和低光照下的泛化能力。在机械结构设计上,草莓采摘器需兼顾准确性与果实保护。两种主流机械结构为刚性夹持器与柔性末端执行器。刚性夹持器结构简单、定位精度高,但易对果实造成机械伤害;柔性末端执行器采用软材料、气动驱动或形状记忆合金,实现对不规则果实的包裹式抓取,能显著降低损伤率。剪切式采摘机构通过在果梗处精确剪断实现采摘,适合果梗明显且位置可预测的品种。无论采用哪种抓取方式,末端执行器都应具备一定的自适应能力,能够补偿定位误差并减少对果实的挤压。
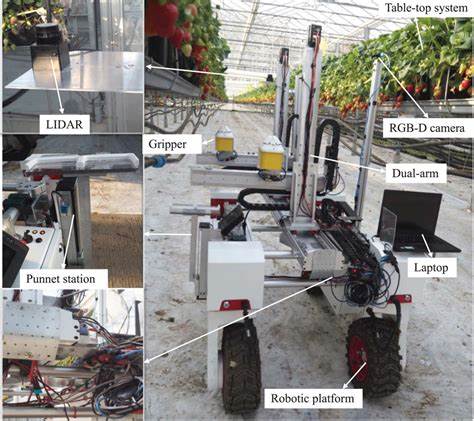
运动与控制系统设计需要在速度与稳定性之间取得平衡。农业环境存在地形不平整、植株密集等因素,机器人平台通常采用轮式或履带式底盘,以保证田间移动稳定性。机械臂或串联执行机构承担果实定位与抓取任务,对实时性要求较高。路径规划既要保证单株采摘的最短运动时间,也要避免与植株、支架发生碰撞。为此,许多系统引入视觉反馈与力觉传感器,通过闭环控制实时调整夹持姿态与抓取力度,从而提高采摘成功率并降低损伤。系统集成方面,草莓采摘机器人需将感知、决策、执行与导航紧密结合。
感知模块输出果实位置、成熟度与空间姿态;决策模块基于采摘策略生成抓取动作序列;执行模块完成移动与摘取;导航模块保证机器人在行间准确定位并完成路线规划。信息融合是关键,来自RGB、深度、力觉与里程计等多模态数据需要在时间与空间上对齐,形成一致的工作场景理解。此外,考虑到田间网络覆盖与计算资源限制,部分推理工作可在车载边缘计算单元完成,而复杂模型的训练与优化仍需依托云端资源。开发过程中,软硬件协同优化不可或缺。软件层面涉及模型训练、数据增强与在线学习策略。由于田间光照多变,数据集应包含不同天气、不同成熟度与遮挡情形的样本,采用合成数据增强及域自适应方法,可以提升模型在未见环境下的泛化能力。
硬件层面需选择合适的相机分辨率、光学滤波方案与计算平台,同时关注能耗管理与防护设计,确保在高湿、高尘的农田环境长期运行。田间试验是验证系统性能的核心环节。评价指标通常包括采摘成功率、损伤率、每小时采摘数量(作业效率)、能耗、单果成本与系统故障率等。在设计科学的试验方案时,应尽量覆盖不同品种、不同植株密度与不同成熟期的情况,记录视觉误检、遮挡导致的漏检、抓取失败与误剪等细项数据。多轮试验有助于发现系统在真实环境中的薄弱环节,并用于迭代优化算法与机械结构。实地评估结果显示,当前成熟的草莓采摘机器人在理想条件下可以达到与人工相近的采摘成功率,但在复杂遮挡、茂密植株或低矮植株结构下效率下降明显。
采摘速度往往受视觉识别与运动寻位速度限制,在每小时可采摘数目上与人工存在差距。损伤率是推广的关键指标,消费者与加工环节对果实外观的要求较高,因此系统需将损伤率控制在可接受范围内。部分研究和商业样机通过柔性抓取与力控制将果实损伤率降到低于人工水平,这为商业化应用奠定了基础。经济性评估不仅考虑单次设备投入,还要评估运维成本、故障停机损失与农场规模效应。对于小规模农场,高昂的初期投入与维护复杂性仍是阻碍;而对规模化经营者,机器人能够在长期节省大量人工成本并保持采摘一致性。商业化路径通常包括设备租赁、按作业时长收费或与农业机械化服务公司合作等多种模式,以降低农户一次性投资门槛。
在推广应用中,农艺适配性和作业流程重构也很重要。某些草莓品种或种植管理方式并不利于机器人采摘,例如植株覆盖密度过高或采用传统架设方法。通过与农业生产者协同优化种植密度、行距和支撑结构,可以显著提高机器人作业效率。培训与售后服务体系也决定了设备在田间的可靠运行与用户接受度,提供远程故障诊断、定期维护与操作培训是必要环节。未来发展方向包括视觉与触觉的进一步融合、轻量级深度学习模型的本地部署、模块化末端执行器的快速更换与适配多品种采摘,以及多机器人协同工作的实现。视觉感知可借助多传感器融合和自监督学习,提升在极端光照与遮挡条件下的识别能力。
触觉传感器与柔性材料的发展将进一步降低果实损伤率,使机器人能够像人工一样识别果实成熟度并做出细腻的握持动作。模块化设计允许同一平台通过更换采摘头适应不同果蔬,提升设备通用性与投资回报率。此外,作业流程智能化与农业大数据结合将推动采摘机器人向更高阶场景演进。通过采集采摘时间、产量、果实大小与成熟度等数据,形成生长模型和预警系统,协助农户优化施肥灌溉与收获计划。多台机器人协同工作借助高精度定位与任务分配算法,可以显著提升整体采摘效率并缩短作业窗口。尽管技术进步迅速,草莓采摘机器人在全面替代人工方面仍面临挑战。
关键在于在不同气象条件、不同品种及不规则植株形态下保持稳定高效的作业能力,以及降低设备成本与维护难度。成功的商业化案例通常结合了农业生产链的优化、灵活的商业模式与扎实的田间服务体系。通过科研机构、设备制造商与农场主的协同创新,可以推动技术从示范应用向规模化普及过渡。总结来看,草莓采摘机器人的设计与开发是一项系统工程,涉及感知、机械、控制、数据管理与生产流程等多方面协同。田间试验是检验技术成熟度与发现实际问题的必经阶段,基于真实田间数据的迭代优化能够显著提升系统性能。面向未来,通过技术进步与生产方式调整并行,草莓采摘机器人有望在提高采摘效率、降低损伤率和优化生产成本方面发挥重要作用,逐步成为现代农业不可或缺的组成部分。
。