随着人工智能和机器人技术的迅猛发展,机器人之间的协作已成为研究和应用的热点。Link-bots作为一类具备集体行为的机器人,展示了令人惊叹的群体智能和自组织能力,突破了传统单个机器人作业的限制,开创了机器人协作的新局面。Link-bots是一种小型、模块化的机器人群体,通过无线通信和智能算法实现信息共享与任务分配,从而完成复杂的集体任务。它们能够根据环境变化灵活调整排列组合,三维结构的自我构建和拆解使其在复杂环境中的应用更具优势。Link-bots的设计灵感来源于自然界中群体动物的行为,如蜜蜂群、蚂蚁队列以及鱼群的协同移动。这些生物通过简单的局部规则实现了高度复杂的群体行为,为Link-bots的算法设计提供了丰富的范例。
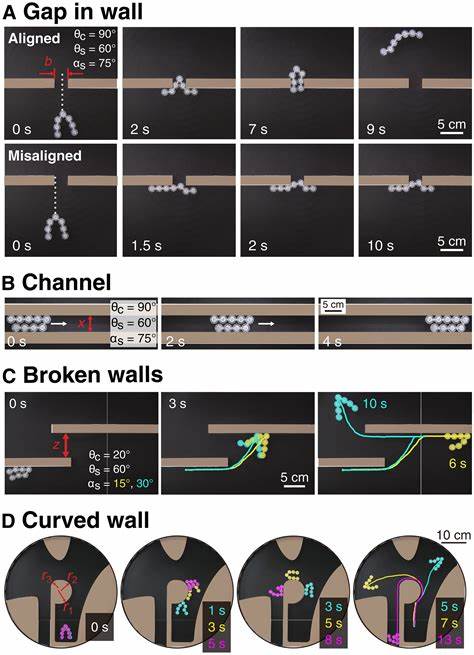
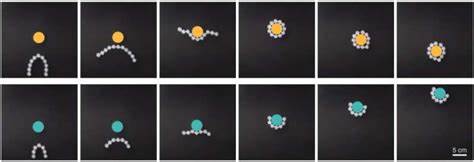
在视频展示中,Link-bots通过自适应连接和紧密配合,完成了如迁移、形状重构等多种任务,体现了强大的集体智能。其关键技术包括分布式控制、多机器人感知融合以及实时决策优化。集体行为的实现并非单靠硬件堆砌,而是依赖创新的软件架构和智能算法。例如,Link-bots使用群体通讯协议进行实时信息传输,确保每个机器人都能快速响应整体任务需求。在实现协同的过程中,面对通信限制、电量管理及环境干扰,Link-bots展现了高度的鲁棒性和适应性。在复杂场景比如灾难救援、空间探索等领域,这种协同能力尤为重要。
利用Link-bots群体协作,可实现快速部署、灵活机动及高容错能力,显著提升作业效率和安全性。未来,随着人工智能算法的持续优化和传感技术的进步,Link-bots的集体智能将进一步强化,实现更复杂的功能。如多机器人自主导航、多任务自动切换及环境学习能力等,将推动其应用边界不断拓展。此外,Link-bots在智能制造、物流自动化、农业监测等产业也具备广阔的应用前景。通过集体行为实现机器人间的协同合作,将有效降低人力成本,提高生产效率,促进产业升级和智能化转型。Link-bots不仅是一种科技创新,更代表了未来人机协作模式的转变。
它们作为连接传统机器人与未来智能群体机器人的桥梁,将引领机器人系统由孤立单元向协同集群迈进。纵观发展趋势,Link-bots集体行为的研究不仅为基础科学带来启示,也为工业和社会带来深远的影响。政策支持、跨学科融合及企业投入将持续推动该领域进步,使得集体机器人技术逐步走向成熟并广泛应用。总而言之,Link-bots作为集体行为的典范,彰显了现代机器人技术融合智能算法与无线通讯的巨大潜力。通过集体行动有效解决复杂环境中的挑战,促进机器人系统性能和功能的跨越式提升。未来,Link-bots必将在多场景多任务中发挥核心作用,助力实现更智能、更高效的自动化社会。
随着相关技术的不断突破,Link-bots的应用范围和能力将愈加广阔,其集体智能也将在机器人发展史中留下浓墨重彩的一笔。