随着机器人技术和自主系统的发展,群体机器人作为具有巨大潜力的研究领域,愈发受到科学界和工业界的关注。近年来,link-bots作为一种基于简单活动个体通过几何连接形成的柔性机器人链,展示了卓越的自组织功能动力学,突破了传统机器人对于复杂控制和计算资源的依赖。本文将从结构设计、运动机制、环境适应以及协作行为等角度,深入探讨link-bots的功能演化及应用前景,揭示其如何通过集体的物理约束实现多元化任务。Link-bots的基础结构源自于体积小巧、装备倾斜支腿的单个机器人单元,每个单元如同一个独立的自驱动体,通过利用震动平台产生的动力,实现自发的运动行为。将多个这样的机器人通过刚性连接件以V字形排列,便形成了link-bot这一独特的多体系统。连接链条不仅保持机器人单元之间固定的距离,还限制了其相对旋转角度,使整个系统拥有特定的形态控制能力。
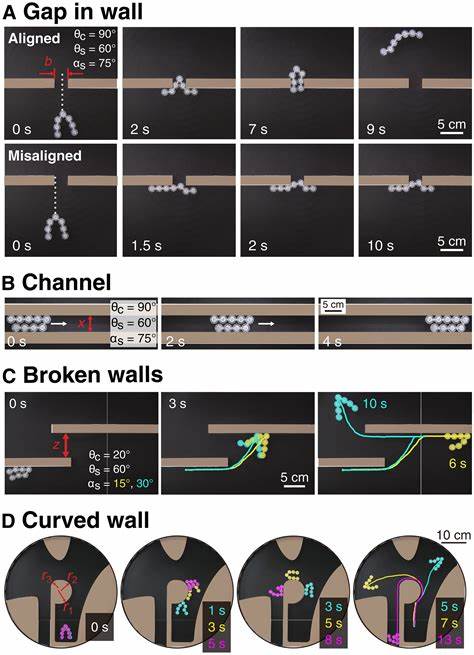
核心参数如连接件长度、展开角以及联结角度,直接决定了link-bots的形态柔韧性及动态表现。令人惊讶的是,尽管link-bots的单体设计相对简单,但正是这些几何连接约束导致了群体整体的呼吸(breathing)和拍打(flapping)两种运动模式。呼吸运动表现为中心机器人之间的夹角周期性张开和闭合,而拍打运动则指侧臂链条的内外摆动,类似于生物的尾鳍摆动。这些运动模式不仅使link-bots能够保持稳定的V字形行进,还赋予它们在遇到障碍时的多样运动策略。实验和模拟均表现出link-bots在接触墙面时出现三种基本步态:平稳的单向移动、沿壁摆动的往复运动,以及静止推挤状态。这些步态的出现取决于link-bots中心连接角度和侧链柔韧性参数。
通过调整这些关键几何参数,link-bots能够灵活选择运动模式,适应不同复杂环境,如狭窄通道、曲面障碍及分叉路口。导航能力是link-bots最为突出的一项功能。在丰富多变的环境中,link-bots展现出探索和开发两种行为模式。当其步态偏向于摆动模式时,link-bots更倾向于探索,即通过墙缝、绕弯及脱离障碍表面,从而快速覆盖区域。而当步态趋向于静止或受限推进时,link-bots更多表现出利用环境的行为,停留或堵塞特定空间,展示出利用地形的能力。此种行为模式的自主调节能力,体现了link-bots作为模块化自主系统的强大适应性。
运输功能方面,link-bots能够携带并操控不同尺寸形状的被动物体。实验表明短链link-bots通常推动物体前行,而长链则可能绕行或绕开物体;此外,link-bots还能将物体反向牵引,或完成包裹和旋转操作。其运输行为不仅单体灵活,多个link-bots的协作也展现了更为复杂的动态交互。例如,一个link-bot推送同时另一个牵引相同物体,能够高效实现向特定方向移动;相反,两个同步推送的link-bots会导致运输力相互抵消,使物体保持静止不动。此外,link-bots之间还能形成竞争与合作关系,例如在墙缝处相互阻塞或协同穿越,体现了群体智能的萌发特点。这些现象彰显了link-bots作为活动粒子链,凭借几何物理约束与噪声相互作用,具备生成复杂自组织模式的能力。
与传统需要高水平计算和通信的多机器人系统相比,link-bots通过极简的个体控制,利用环境物理交互与几何约束的内在特性,实现了令人瞩目的多功能和自适应。计算模型进一步验证了这一点,模拟考虑了自驱动力、噪声扰动及间隙约束,精确再现了呼吸和拍打运动模式、三种步态的转变及环境交互中的导航策略。这种模型不仅揭示了核心参数如中心角和侧链柔韧性对整体动态的主导作用,也为设计可编程的软体机器人提供了理论基础。link-bots的设计理念以简单模块为出发点,具备优秀的扩展性和材料适应性,适合从微观到宏观多种尺度的应用。未来的发展方向可以考虑动态调节连接角度和间隙,通过环境刺激或内部机制对硬件结构进行实时改造,以实现更加丰富的形态变化和功能切换。在实际应用层面,link-bots有望用于复杂地形中的物流运输、环境监测与探索、灾难救援中的自主移动等领域。
其低成本、高鲁棒性和易于规模化部署的特性,使其具备广泛的市场潜力。link-bots作为一种活动聚合体的典范,开辟了机器人集群设计的新思路,让我们重新认识到通过物理法则和几何约束,即使最简单的单元也能形成富有智慧与功能的系统。这种“从规则中涌现”的理念,不仅有助于理解自然界群体行为的机制,也为制造下一代智能柔体机器人奠定坚实基础。总之,link-bots以其独特的自组织动力学和多功能表现,预示着柔性机器人技术未来的发展方向,融合设计的简洁性、物理交互的复杂性以及环境适应的智慧性,正不断推动机器人科学迈向更高水平的自主与智能。随着研究的深入,link-bots必将在科学探究和实际应用中展现更大潜力,带来机器人技术的新革命。