随着人工智能和机器人技术的快速发展,对高效且精准的多模态数据可视化工具的需求日益增长。Rerun作为一款基于Rust开发的开源平台,恰好填补了这方面的空白。它不仅为机器人、空间和嵌入式人工智能领域提供了强大的数据建模、采集、存储、查询与可视化解决方案,还因其高性能和易用性,迅速赢得开发者社区的广泛关注。Rerun的核心理念是帮助用户更好地理解复杂过程中的丰富多模态数据,如二维和三维图像、时间序列、文本及张量等,进而提升调试、测试与模型训练的效率。Rerun依托Rust这一系统编程语言的性能优势,兼具安全性与效率,充分满足多传感器、大规模数据流处理的需求。对广大AI工程师和机器人开发者来说,Rerun成了一把可以依赖的"视觉调试利器"。
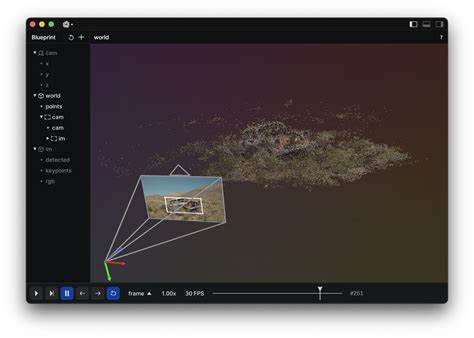
基本上,Rerun包含三个主要模块:数据采集SDK、数据可视化查看器以及支持的数据查询接口。开发者可使用Python、C++、Rust等多种语言的SDK,将各种数据类型(如点云、影像、深度图、文本描述等)以统一格式高效记录和上传。用户能够在Rerun Viewer中实现对这些异构数据的实时渲染与动态浏览,直观了解机器人感知和决策的每一步过程。以机器人导航为例,传统的文本日志难以揭示机器人的决策逻辑。使用Rerun,开发者可以同步查看机器人摄像头捕获的RGB图像、激光雷达点云、分割后的场景理解结果及三维环境地图等,实时回放数据时间轴,找出导航失败背后的传感器异常或认知误差。与此同时,Rerun还支持将日志数据存储为.rdd文件,方便日后离线分析及算法验证。
多模态、多时间尺度数据的同步展示,是Rerun的最大亮点之一。相比传统的单一传感器数据浏览,Rerun以时间线为核心,有效串联不同信息流,帮助研发人员重现和定位问题,提升机器人系统的鲁棒性和智能水平。不仅如此,Rerun提供的数据查询接口支持通过代码灵活提取感兴趣的数据段,为训练和评估机器学习模型提供了直接便利。底层采用Rust语言,为Rerun产品稳定运行提供强大保障。Rust以其内存安全、并发性能优越著称,能高效处理大量实时数据流,保证系统响应迅速且避免内存泄露等问题。此外,Rust的生态活跃,确保了Rerun未来功能的持续扩展和维护。
开源社区为该项目注入了多样力量,包括视觉计算、机器人感知、数据可视化和跨语言SDK开发等领域的贡献者,使其不断进化完善。尽管Rerun目前已具备强大的功能,项目仍处于快速发展阶段。当前版本面临着一些限制,如在处理超大规模点云数据时,性能可能有所下降,且透明度支持尚未实现,这些都是开发团队着力攻克的方向。未来,Rerun计划引入基于磁盘的存储方案,以突破内存限制,支持更大规模的数据集。商业化方面,Rerun采用开源核心加商业平台的模式。基础SDK永久免费开放,服务个人开发者和科研群体。
与此同时,一个面向团队和企业的商业数据平台也在打造中,旨在为机器人和计算机视觉产品提供端到端的定制化数据管理和可视化支持。Rerun的应用场景极其丰富。除了机器人导航调试、自动驾驶辅助感知、仿真环境状态监控外,还涵盖工业流程监控、安防态势感知和医疗传感器数据分析等领域。其灵活的数据结构和多语言支持使其能够对接各类复杂传感器数据,满足不同业务的个性化需求。总之,Rerun作为Rust生态中极具前景的可视化SDK,以其专业的数据采集、多模态融合和实时展示能力,为物理AI的发展提供了坚实的技术保障和创新支持。它不仅助力科研人员高效调试复杂机器人系统,也为工业智能化和空间AI数据可视化带来新思路。
未来,随着社区的不断壮大和功能迭代,Rerun有望成为多领域多模态数据可视化的行业标准工具。开发者和企业若希望深入理解和应用机器人及空间数据,Rerun无疑是值得关注和投入的利器。在迈向智能化未来的征程中,Rerun以独特的Rust底层优势和丰富的多模态支持,为物理AI的"看见"注入无限可能。 。