现代人工智能技术虽然在特定领域表现优异,但仍然无法达到生物大脑那种灵活应对复杂动态环境的能力。基于传统图灵模型的计算机系统,在推理和学习之间往往需要分阶段进行,这种顺序式的处理方法限制了它们面对现实世界不断变化条件时的适应性和实时反应能力。而神经生物回路则能够在“超图灵(Super-Turing)”模式下,实时并行地完成推理与学习,使系统得以动态调整和优化自身行为,显著提升效率和可靠性。近期,科学家们开发出一种创新的超图灵突触电阻电路,成功将这种神经形态计算模型引入智能变形翼的控制系统中,开启了高效自适应智能飞行控制的新篇章。该突破性的电路不仅能够实现推理与学习算法的同步运行,还具备超低功耗和快速响应的优势,为复杂气动环境下飞行器的稳定性和性能提升提供了强大技术支撑。 传统的人工神经网络(ANN)依赖于大量离线数据训练,并在执行阶段仅固定运行学习后形成的推理模型。
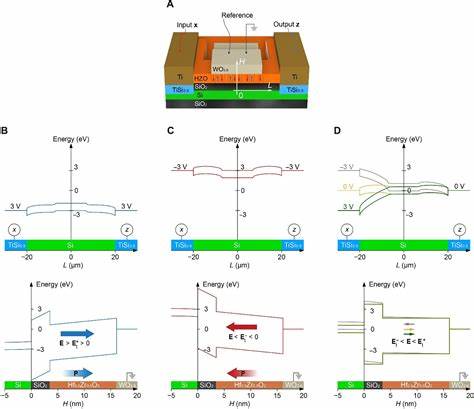
尽管这在很多受控环境有效,但在空气动力学变化复杂且难以预料的自然飞行条件中,这种模式的局限性逐渐显现。尤其是面对如失速这样的极端状态,ANN往往无法及时调整其控制策略,导致飞行性能下降甚至安全隐患。而基于超图灵计算模式的突触电阻电路,因其独特的结构设计,内置了学习和推理功能,使其能够实时感知变形翼的飞行状态,动态调节控制参数,迅速响应流场变化,有效降低阻力与提升升力,实现失速恢复和稳态飞行控制。 该突触电阻(简称synstor)电路的核心在于其能够模拟生物突触的动态权重调整机制。具体来说,突触的电导率(即权重)不仅决定了输入信号转化为输出电流的比例,同时可以通过输入和输出端的电压脉冲的协同作用进行实时调节。电路设计采用了硅基通道,结合具有铁电性能的Hf0.5Zr0.5O2层及钨氧化物参考电极,形成一种特殊的电子结构。
当同时施加特定幅度和极性的电压脉冲于输入与输出端时,铁电层内的域结构会发生微小可控变化,调节载流子浓度,从而改变电阻值。这样一套机制使得每个synstor单元能够以模拟方式实现权重的连续调节,保证学习与推理过程的无缝衔接和高精度控制。 更重要的是,这种电路实现的并行学习推理功能大大缩短了自适应调整的时间。实验中,科学团队将synstor电路集成于一个2×2阵列,控制风洞内的智能变形翼。通过对升阻比及其波动的实时监测,电路能够在毫秒级时间内反馈调整控制脉冲,微调风阻和升力。当机翼处于预失速或失速状态时,电路迅速学习环境变化,优化形变策略,成功恢复稳定飞行。
与人类操纵者和传统离线训练的ANN相比,synstor电路表现出更快的学习速度、更低的能耗和更优的适应性能。尤其在失速这个极具挑战的飞行环境,ANN因无法即时学习更新控制参数而无法有效稳定机翼,而synstor电路凭借其超图灵并行学习能力实现稳定恢复,充分体现了该技术的卓越优势。 在能耗方面,synstor电路的运行功率低至纳瓦级,是传统计算机系统数瓦至数千瓦功耗的百万分之一。其低功耗特性不仅有助于延长无人机等飞行器的续航时间,也为未来在限制能源环境下的广泛应用奠定基础。此外,电路材料的稳定性和耐久性亦通过长时间拉锯式测试和反复调节验证,确保系统在长周期复杂环境下仍能保持良好性能,不受环境干扰自动修正导电性误差。 结合神经生物学与材料科学的理论基础,该研究对实现真实世界的智能自适应系统具有深远意义。
突破图灵式序列计算约束,提出并实现超图灵计算范式,为未来人工智能硬件提供了全新发展思路。synstor电路极大缩短了学习反馈时间,使飞行器能够像鸟类一样灵活调整翅膀形态应对气流变化,实现真正的自主飞行控制。同时,其低能耗特性与易集成优势,为边缘计算、物联网、智能机器人等领域的内存计算与实时学习提供了极具潜力的解决方案。 当然,此项技术也面临着规模扩大、阵列连接复杂度增加等挑战。未来研究将致力于synstor阵列微缩化设计和制造工艺改进,提升单元一致性与制备效率。此外,配合先进传感与控制算法,融合多尺度多模式的飞控系统,将进一步激发该技术在航空航天、自动驾驶、机器人等高技术领域的应用潜能。
总结而言,超图灵突触电阻电路在智能变形翼控制中的成功应用,不仅标志着神经形态计算走向实际工程的重大突破,还充分展现了跨学科融合创新对人工智能硬件发展的推动力。这项研究拓展了传统人工智能与控制工程的边界,催生出具备实时在线学习与推理能力的全新智能系统范式。未来,随着该技术的不断成熟与推广,或将引领新一代智能飞行器乃至广泛智能设备迈向更高效、灵活和节能的智能时代。