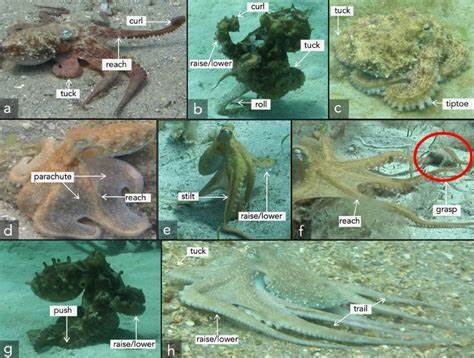
章鱼作为海洋中极具智慧和灵活性的生物,一直以来都吸引着科学家们的广泛关注。和许多其他动物不同,章鱼拥有八条高度灵活且功能强大的触腕,这使它们能够应对复杂多变的环境和任务。近期一项综合性研究揭示了章鱼在执行各种行为时,偏好用不同的触腕来完成特定任务,这一发现为我们深入理解章鱼的神经控制机制、行为协调乃至整个软体动物的适应策略提供了重要的线索。章鱼八臂的协调能力一直是科学家研究神经系统和运动控制的热点。尽管所有触腕理论上都具备完成任意动作的能力,但在自然环境中,章鱼会根据不同的行为倾向选择前方的触腕或后方的触腕来完成特定任务。研究显示,章鱼通常更频繁地使用前方的触腕来探查、抓取物体或操作工具等细致动作,而后方触腕则主要承担移动支撑和身体姿势调整等功能。
该研究团队基于对25只野生章鱼近20年来在全球多个海域拍摄的视频片段进行了系统观察与分析,对章鱼行为进行了深入分类,从捡拾、行走到筑巢等动作均进行了细致划分。研究发现,章鱼在完成各类动作的过程中,经常会同时协调多个触腕的不同动作,表现出相当高的灵活性和复杂的运动模式。章鱼的触腕可通过缩短、延长、弯曲和扭转这四种变形方式,实现极其丰富的形态变化。在多样任务中,这些变形方式的灵活组合使章鱼能够适应复杂多变的海底环境。例如,尽管所有触腕均能参与到动作中,但触腕在具体变形方式和动作模式上的分工却有所差异。前方两对触腕更倾向于伸展、举起和卷曲的动作,而后方两对触腕则更多执行支撑身体、滚动等涉及移动的动作。
这样的分工体现了章鱼在进化过程中形成的高效动作策略,既保证了行为的灵活性,也提高了能量使用的效率。值得注意的是,研究还指出,章鱼并没有明显的左右偏好,这意味着它们的神经控制系统在左右手臂的使用上相对均衡,显示出非常强的适应性和多样性。章鱼的触腕不仅数量多,而且功能强大且灵活,这一特点使其成为生物灵活运动和神经控制研究的重要模型。章鱼通过协调八臂的分工合作,不仅能够准确完成复杂的捕食、逃逸和筑巢等行为,也能在多任务环境下表现出卓越的适应性。此外,该研究对软体机器人领域也具有重要意义。章鱼触腕的柔韧性和多功能性为设计灵活软体机械臂提供了极佳的生物学参考。
未来的软体机器人可能借鉴章鱼的动作分工和灵活变形模式,提升在复杂环境中的工作效率和适应能力。章鱼的研究为生态学、神经科学和工程学等多学科提供了多角度的启示。首先,从生态行为学角度看,章鱼的行为策略反映了它们在自然环境中应对捕食、躲避和栖息的智慧。其次,神经科学层面探讨了复杂运动控制和高效行动协调的神经机制,揭示了非脊椎动物惊人的神经处理能力。再次,在机器人学和材料科学中,章鱼的触腕变形机制为开发新型柔性材料和驱动技术开辟了新的思路。未来的研究或将聚焦于章鱼神经系统与触腕运动的具体神经网络结构,进一步揭示其内部协调工作原理。
同时,有待深入探索章鱼不同环境适应性的行为变化,以及个体间在触腕使用上的差异性。这些探索不仅有助于理解章鱼在复杂生态系统中的生存策略,也为软体机器人适应复杂环境提供生物借鉴。总结来看,章鱼在不同任务中灵活使用不同触腕的发现,不仅是对章鱼生物学认知的深化,也为多个科学领域提供了跨界启发。章鱼的八臂智慧体现了生命在自然选择下的精妙设计,科学家对这一现象的揭示,正推动着从基础科研到应用技术的不断进步。未来,随着研究的不断深入,我们或将解锁更多章鱼神秘行为背后的科学密码,从而更好地理解生命的复杂性与多样性。 。