随着计算机视觉技术的不断发展,三维场景理解在自动驾驶、虚拟现实、机器人导航以及智能监控等多个领域扮演着举足轻重的角色。全景图像由于其360度视角的特点,成为三维场景重构和理解中重要的数据来源。然而,如何高效准确地从全景图像中提取三维信息,仍然是一个复杂而具有挑战性的课题。近期,针对这一难题,HUSH(Holistic Panoramic 3D Scene Understanding using Spherical Harmonics)框架应运而生,利用球谐函数(Spherical Harmonics,简称SH)在多任务三维场景感知中展示出卓越的效果和显著的优势。球谐函数因其在物理和信号处理领域中以高效表征复杂空间信息著称,被引入到全景三维场景理解中,带来了一场技术革新。HUSH框架的核心在于将球谐函数作为基底,结合多尺度图像特征,通过层次化的注意力机制实现任务相关特征的提取与整合。
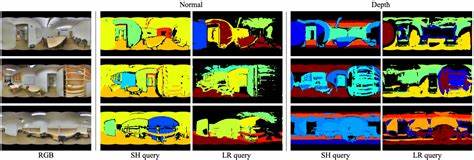
具体来说,HUSH首先从输入的全景图像中抽取多尺度的图像特征,同时估计对应的球谐系数,这些系数决定了适合当前场景的球谐基函数配置。通过这种自适应的过程,SH基底能够更精准地与场景几何信息(如深度、法线)对齐,极大提升了特征表达的几何一致性。随后,HUSH利用设计精妙的层次化注意力模块,以SH基底作为查询,将图像特征进行加权组合,生成具有丰富语义和空间信息的综合场景特征。此机制不仅提升了模型对空间结构的敏感度,还保证了跨任务的通用性和鲁棒性。同时,SH基底指数模块根据不同任务的需求,自适应调整关注的基底权重,确保输出的特征具备高度的任务针对性,从而在深度估计、表面法线推断以及房间布局预测等多个关键任务中达到优异表现。与传统依赖可学习查询的方法相比,HUSH使用球谐函数作为查询的方式在几何一致性方面表现更佳,这不仅为任务相关特征的提取带来了更高的准确率,也显著减少了模型训练的复杂度。
该方法通过在2D和3D空间的直观可视化验证,清晰展示了SH基底在捕捉场景几何细节上的优势。此外,HUSH在多个公开深度估计基准测试中刷新了最佳成绩,充分证明了其架构设计的合理性和强大性能。技术上的突破使得HUSH拥有广泛的应用潜力,不仅提升了全景三维理解的效率和精度,还为今后多任务场景分析和虚拟环境重建奠定了坚实基础。未来,随着传感器硬件和计算能力的提升,结合HUSH框架的三维场景感知将能够支持更复杂、更动态的真实环境理解。总之,HUSH框架通过创新性的球谐函数应用和模块设计,为全景图像的三维场景理解提供了一个高效、精准且适应性强的解决方案。它不仅推动了学术研究的深入,也为产业界提供了实现智能三维感知的前沿技术支撑。
随着更多研究和应用不断涌现,球谐函数有望成为三维视觉领域的重要基石,推动智能视觉技术迈向新的高度。