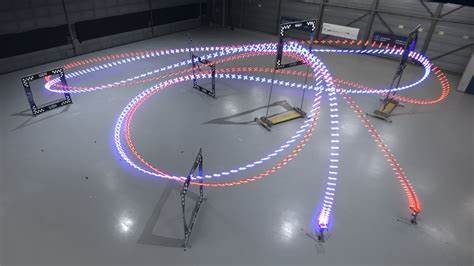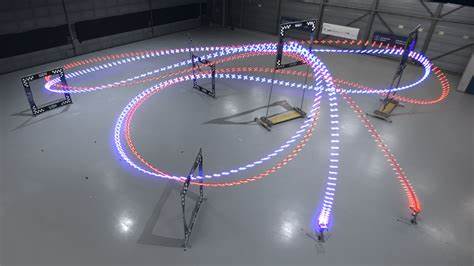
无人机竞速作为近年来新兴的高科技竞技运动,因其高速机动性和极富挑战性的赛道设计,吸引了全球众多顶尖飞行员和技术研发团队的关注。2023年,一项名为Swift的自主飞行系统横空出世,借助深度强化学习实现了无人机在实地竞速比赛中超越人类世界冠军的壮举,标志着无人机自动控制和人工智能领域迈出了关键一步。无人机竞速是一项在三维空间内追逐穿越多个狭窄关卡的高难度运动,比赛环境复杂且瞬息万变,要求飞行器实时处理视觉和惯性传感信息,快速做出飞行动作调整。人类飞行员通过头戴式显示器获取第一人称视角,凭借丰富的经验和精确的手眼协调完成高速飞行动作。相比之下,打造一套能够在无外部定位支持下,依靠仅有的机载传感器实时感知环境,实现高速精准飞行的自主系统具有极高的技术难度。Swift系统的核心优势在于其创新地融合了深度强化学习算法与多模态感知机制。
系统由感知子模块和控制子模块构成,前者借助视觉惯性里程计和卷积神经网络进行场景理解与关卡检测,后者则是一个经过大规模模拟训练的神经网络控制策略,能够在接收到环境的低维状态编码后,输出高频次的飞行控制指令。该方法通过模拟环境中的强化学习训练,实现对无人机连续动作的长期策略优化,特别强调保持下一赛道关卡在摄像头视野内,以提升感知准确度和定位精度。模拟训练过程中,为了弥合现实世界与虚拟环境之间的差距,研究团队采用了基于真实飞行数据构建的经验残余模型。利用高精度动作捕捉系统采集传感器误差及动力学残差,结合高斯过程和邻近点回归方法,将这些误差引入仿真环境,进而进行强化学习策略的微调。该“模拟增现实”策略有效提升了模型在现实场景下的泛化和稳定性,显著缩短了从训练到部署的周期。比赛现场,Swift与三位顶级人类飞行员进行了多场实时对决,均展现出了不凡的实力。
比赛轨道长约75米,包含七个正方形关卡,需依序通过三圈以判定胜负。值得一提的是,参赛的无人机硬件参数与人类飞行员使用的保持一致,确保竞速条件公平。Swift不仅赢得了大多数比赛,且创造了比以往任何人类飞行员更快的单圈时间,彰显其超群性能。数据分析显示,Swift在起跑反应速度和复杂急转弯处有明显优势,其平均飞行速度更高,路径规划更为紧凑且稳定。此外,Swift通过强化学习获得的策略能有效维持接近无人机动力极限的控制力度,这种长期奖励优化机制与人类飞行员根据短期目标做出决策的方式存在显著差异。自主系统的感知模块融合传统视觉惯性导航技术与深度学习关卡检测网络,采用卡尔曼滤波器融合状态估计,保证定位信息的实时准确性。
控制策略基于前馈多层感知网络,利用近端策略优化算法在高保真动力学模拟环境中训练,并结合真实数据进行策略微调。这种端到端的设计不仅提升了飞控系统的稳定性,还增强了其对感知和模型误差的容忍度,使得无人机能够在复杂动态环境中高速飞行而保持精准轨迹。除了技术突破,Swift的成功还向业界展示了深度强化学习在物理世界真实机器人运动中的巨大潜力。过去,类似深度学习方法主要局限于模拟或限定环境中的成就,难以直接迁移到现实世界。该项目通过巧妙地引入基于数据的误差模型和感知策略,打破了这一瓶颈,实现了与人类顶级选手平起平坐的自主飞行水平。对比传统基于模型预测控制和轨迹规划的方法,Swift表现出了更强的鲁棒性,尤其是在感知噪声和动力学不确定性较大时,传统方法性能急剧下降,而Swift则依旧稳定完成任务。
尽管取得了令人瞩目的成绩,Swift仍存在改进空间。人类飞行员拥有更高的摄像头刷新率,反应速度更快,同时对环境光照变化具备较强适应能力。现有系统对外观变化较敏感,未来可通过多样化训练数据和更先进的感知模型提高泛化能力。此外,系统尚未具备碰撞恢复能力,而人类飞行员可以在事故后快速重返赛道。技术层面的深入研究将继续推动自主无人机竞速的发展,激发更多应用场景的探索,例如无人机物流配送、高速救援、农业喷洒等领域。展望未来,深度强化学习结合先进感知和动力学建模的方法,有望成为实现高度自主机器人飞行控制的关键。
无人机竞速作为试验场,其挑战性和高要求为算法创新提供了绝佳场景,所获经验可推广至更广泛的无人系统自动驾驶任务。Swift系统的诞生不仅代表了机器智能操控极限飞行的突破,更象征着人工智能和机器人技术在现实世界中日益成熟的能力和应用潜力,开启了机器人运动竞技新时代。对于科研人员、无人机制造商和竞速爱好者而言,这项成果既是鼓舞也是启发,激励着跨学科团队持续探索与创新,推动无人机自主飞行技术不断向前发展。通过融合模拟训练、真实数据驱动微调以及深度学习方法,未来的无人机竞速必将迎来更多精彩表现和高速突破,逐步实现无人机自主操控的全面智能化。