随着机器人技术的不断发展,机器人操作系统(ROS)已成为机器人开发者和研究者的重要工具。然而,传统的ROS操作往往需要较强的编程知识和复杂的指令输入,限制了普通用户和开发者的使用体验。针对这一痛点,Yutarop开发了一个基于多模态控制协议(MCP,Multi-Modal Control Protocol)的服务器——ROS MCP,它革命性地通过自然语言实现对ROS机器人的控制,为机器人应用注入了更多的智能化与便捷性。 ROS MCP服务器是一款专为ROS环境设计的控制系统,能够通过自然语言指令与ROS主题(Topics)、服务(Services)以及动作(Actions)进行交互。此服务器完全支持ROS2,且兼容任何ROS消息类型,极大满足了不同机器人系统和应用场景的需求。通过MCP服务器,用户可以用简单的口头或文本命令直接操纵机器人,开启机器人自动化的新纪元。
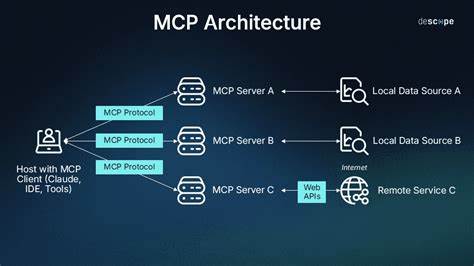
ROS MCP服务器的核心优势在于其多层次、多功能的操作能力。首先,其支持ROS主题的管理,用户可以轻松查看、监控以及向ROS2话题发布消息,无需撰写复杂的代码。其次,服务交互功能让机器人服务调用变得更加直观,人们可以查询当前可用的服务列表,并用自然语言完成诸如重置机器人环境或启动特定功能的操作。此外,通过动作支持,用户能够发送复杂的运动指令或者任务需求,例如指挥机器人沿指定距离前进,极大提升了机器人操控的精细化和灵活性。 从技术架构来看,ROS MCP服务器由两个关键组件构成:Socket服务器(socket_server.py)与MCP服务器(ros-general.py)。Socket服务器作为轻量级的本地服务器,监听本地8765端口,专门负责处理与用户界面相关的操作,如调用Gazebo仿真工具或rqt_graph图形界面。
这使得机器人操作不仅限于命令行,用户还能享受到直观的图形化交互体验。MCP服务器则作为核心控制单元,基于Python构建,负责解析和处理用户的自然语言输入,转换为具体的ROS指令并与Socket服务器进行通讯,保证运行环境内外的无缝衔接。 ROS MCP的设计充分考虑了ROS2网络环境的复杂性和安全性。为了确保MCP服务器与本地机器节点通信的正常运行,系统要求两者处于同一局域网内且设置相同的ROS_DOMAIN_ID。该设计有效避免了网络冲突和资源访问权限问题,提升了操作的可靠性和响应速度。在配置方面,用户通过调整claude_desktop_config.json中的路径及环境变量即可灵活部署,支持多平台包括Linux、macOS和Windows。
从用户体验的角度来看,ROS MCP大大降低了ROS机器人的操作门槛。对新手来说,复杂的ROS节点管理和消息发布不再是障碍,借助自然语言描述即可实现对机器人多维度的控制。而对于资深开发者,MCP服务器提供了丰富的调试和监控工具,包括话题列表查询、节点状态检测、服务和动作调用等功能,帮助他们更高效地开发和维护机器人系统。此外,该系统还支持GUI工具的远程调用,无需手动启动,节省大量时间和精力。 在实际应用演示中,ROS MCP表现出了强大的实用性和灵活性。例如,通过MCP服务器指令,用户可以一键启动Gazebo仿真环境,加载TurtleBot3机器人模型,并发送移动指令让机器人向前移动一米。
重置仿真世界状态的操作也可轻松实现,极大优化了机器人调试和测试流程。此类功能不仅适用于教育和科研,也为工业自动化、智能物流等领域的机器人控制方案提供了创新思路。 未来,随着人工智能技术的不断进步,ROS MCP服务器有望集成更多高级功能,比如更深入的自然语言理解、跨设备协同控制以及基于机器学习的自适应指令优化。结合云计算和边缘计算的优势,这种基于自然语言的机器人控制方式将推动机器人技术向更智能、更高效和更人性化的方向发展。 总之,ROS MCP服务器作为一款开放源代码的创新产品,不仅增强了ROS系统的可操作性和友好性,也为机器人控制注入了前所未有的智能元素。它彻底打破了传统命令行操作的壁垒,让机器人控制如同与人对话一般自然、直观。
对于机器人开发者、研究机构乃至普通爱好者而言,ROS MCP无疑是迈向智能机器人未来的重要桥梁和工具。随着社区的持续推动和技术的不断完善,基于自然语言的ROS机器人控制将成为行业发展的重要趋势,推动机器人应用走向更广阔的前景。