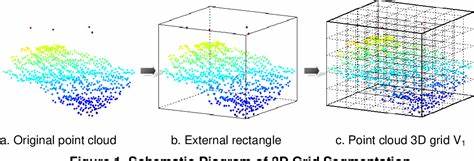
随着自动驾驶和智能交通系统的快速发展,车辆对周围环境的感知能力愈加重要。道路封锁看板作为交通管理和安全的重要标志物,其准确且及时的检测对自动驾驶车辆的路径规划和安全措施至关重要。传统的视觉检测方法在复杂光照条件和遮挡环境下常常面临瓶颈。为此,研究和实现基于3D激光雷达点云数据的封锁看板检测算法,成为当前热点方向之一。 该算法专注于使用仅由LiDAR采集到的点云数据以及反射强度信息,摒弃了对RGB图像的依赖,充分利用点云的三维空间特性来实现看板的高效检测。算法首先通过对输入的PointCloud2消息进行多维度的滤波处理,限定在特定距离范围与视角区间内提取有效点,同时设定强度阈值以剔除弱反射点,从而清晰勾勒出潜在的目标区域。
经过初步筛选后的点云数据采用密度基聚类算法DBSCAN进行处理,该方法能够根据点之间的密度关系自动区分不同的簇,优化分割效果且无需预先指定簇数量。这样便能有效将散杂的环境点云剔除,提取出可能对应道路封锁看板的聚类块。 该过程中,核心技术体现在将每个聚类点云与预定义的看板模板点云进行匹配。使用迭代最近点算法(ICP)实现初步的空间对齐与精确配准,测量匹配的适应度分数以判断两组点云的相似度。适应度得分超过预设阈值即被认定为成功检测,实现动态且准确的目标识别。 算法具备实时处理性能,可通过ROS2框架以节点形式实现,方便集成于现有智能驾驶系统。
针对典型应用场景,设置合理的距离和角度过滤参数,确保算法对前方0.5米至4米内、视角10°到170°范围内的点云数据重点关注,提升检测命中率和效率。此外,反射强度门限确保仅分析较强反射物体,提高杂波抑制能力。 该方案的优势显而易见,相较于传统基于单一视觉的检测方式,点云数据能够提供稳定且无光照影响的三维信息,提升环境感知的鲁棒性。同时,结合DBSCAN和ICP两大经典算法,实现了复杂环境下的精准无监督目标提取和匹配,具备高度的泛化能力和实用价值。 在实际操作中,用户只需克隆相关代码仓库,完成依赖包安装和ROS2工作空间构建,即可快速部署该检测节点,加速算法测试及二次开发。配套的bag文件模拟实验和launch文件自动启动均优化了用户体验,使算法演示和调试更加便捷。
未来,该算法有望结合更多多传感器数据融合技术,配合摄像头、雷达、IMU等多模态感知,进一步提升检测准确度和场景适应能力。同时,借助深度学习等先进技术实现模板点云的自动更新与分类优化亦是发展方向之一。点云检测算法作为智能驾驶感知领域的基础模块,其深化应用将显著推动无人驾驶及自动化交通管理系统的安全性和智能化水平。 综上所述,利用3D激光雷达点云数据实现的道路封锁看板检测算法,突破了视觉限制,结合科学的滤波机制和成熟的聚类匹配技术,实现了高效、实时且鲁棒的看板识别。其在自动驾驶环境感知中的重要作用不可忽视,并且为相关领域的科研与工程实践提供了宝贵借鉴和创新思路。随着技术不断成熟和应用场景拓展,基于点云的目标检测必将成为智能交通系统不可或缺的核心支撑。
。