TMS320F28379D是德州仪器(Texas Instruments)推出的一款功能强大的数字信号处理器,广泛应用于工程和自动化控制系统中。在使用这一微控制器的过程中,用户常常需要进行多个参数的校准,以确保其性能的稳定与准确性。其中,ADCPPB1OFFREF值的确定是一个重要的环节。本文将深入探讨此代码片段的目的与实现过程,帮助用户更好地理解与利用这一微控制器。 首先,我们来分析一下这一代码段的整体结构。代码中涉及的主要变量有`offset_lemV`和`offset_lemW`,它们分别用于存储电流传感器的偏移量。
为了确保测得的值在噪声干扰较少的情况下进行处理,代码设计了一个循环来多次取样,最终取其平均值。这种设计思路恰恰是为了提高数据的可靠性,避免因为单次测量导致的错误而影响后续计算。 在代码中,我们首先看到两个定义了偏移过滤系数的变量K1和K2。K1的值为0.998,而K2的值为0.001999。这两个系数的设定依据了数字低通滤波器的设计原则,K1和K2的比例设计可以确保历史数据的影响逐步减小,同时新测量的值得到合理的强调。具体来说,K1的值接近1使得过去的偏移量对当前的计算仍有较大影响,而K2的较小值则意味着新测量值的贡献相对更小。
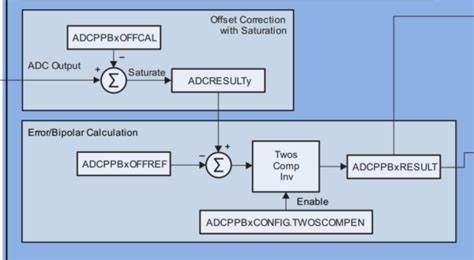
接下来,在循环内部,通过读取`IFB_LEMV`和`IFB_LEMW`,这两个定义分别代表着来自ADC(模数转换器)的电流信号的测量结果。随后,利用公式 `offset_lemV = K1*offset_lemV + K2*(IFB_LEMV)*ADC_PU_SCALE_FACTOR` 进行更新。其中,`ADC_PU_SCALE_FACTOR`用于将ADC的输出结果进行缩放,确保得到的偏移量在合理的范围内。这个过程体现了一种典型的低通滤波器设计思路,通过持续加权历史值与新采集的值,为系统带来平滑的状态变化。 在代码的最后部分,通过将计算出的`offset_lemV`和`offset_lemW`分别乘以4096来设置ADC的偏移参考值。这个乘法的操作并不是随意的,而是为了把浮点数的结果映射到ADC的数字范围内,从而使得硬件能够更好地理解和处理这些值。
值得注意的是,为了确保总体的有效性,整个过程运行了20000次,这一循环的设计细节可以被看作是对环境噪声的一种滤波。实际上,在某些复杂系统中,可能会面临由于电气干扰导致的读数不稳定问题。因此,通过这样的多次采样与滤波,确保得到的偏移量是一个合理范围内的平均值,能够有效地反映真实世界中的信号变化情况。 代码中设定的阈值`OffsetCalCounter>1000`也彰显了这一设计的巧妙。只有在经过一定数量的初步采样后,才真正开始进行偏移量的计算。这一措施进一步增强了算法的稳健性,避免在早期采样阶段因为突发干扰导致不准确的结果。
总结来说,TMS320F28379D的这一段代码揭示了数字信号处理中的基本原理和思想,展示了如何通过算法优化提高结果的准确性与可靠性。作为现代微控制器中的佼佼者,TMS320F28379D在工业控制、无人驾驶等多个领域的应用前景广阔。而理解其程序设计的核心思想,对于希望深入学习这一技术领域的工程师们来说,无疑是一个非常重要的实践与学习机会。 未来,将会有越来越多的开发者借助于TMS320F28379D进行更加复杂的控制算法设计,实现更高效、更智能的系统。而在这个过程中,像ADCPPB1OFFREF这样的细节处理,无疑是保证系统稳定运行的重要一环。希望通过这篇文章,能够帮助更多的开发者深入理解数据采集与处理中的重要机制,从而在实际应用中实现更大的成功。
。