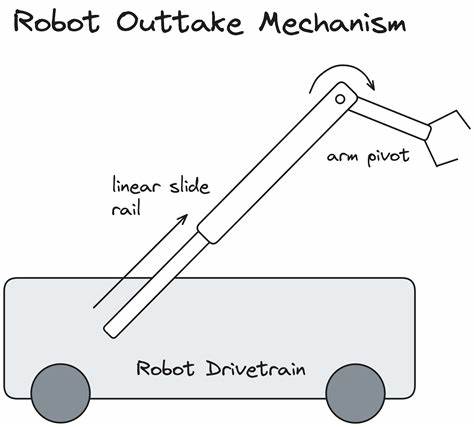
随着机器人技术的不断发展,机器人控制系统也不断演进以满足更复杂的任务需求。传统的机器人控制往往依赖有限状态机和异步回调机制来管理各种机械部件的协同工作,然而这类方法虽然灵活,却带来了代码难以维护、调试困难、逻辑混乱等诸多挑战。近年来,引入结构化并发(Structured Concurrency)的理念,为机器人控制领域带来了革命性的改进,帮助开发者以更直观、更安全和更高效的方式编写并发代码。结构化并发的核心思想在于将并行任务的产生与结束限制在一个清晰的作用域之内,从而简化多线程编程并提升代码的可控性。机器人控制中,机械动作往往需要同时执行多个任务,例如机械臂与滑轨的同步运动,而传统异步模型难以同时保证各子任务的正确结束和异常处理。结构化并发通过允许开发者在一个特定的作用域内“分叉”若干子任务,并在退出该作用域前等待所有子任务完成,极大降低了代码的复杂度和潜在风险。
以FTC(FIRST Tech Challenge)机器人为例,多数团队采用基于有限状态机的非阻塞逻辑来实现动作序列,但这种方式需要频繁检查每个状态的完成与超时,代码逻辑繁琐且难以扩展。相比之下,结构化并发提供了一个封装良好的同步接口,使动作调用表现得如同传统的同步调用,便于理解和调试。传统的异步操作如motor.setTargetPosition(),其返回时动作往往尚未完成,调用方需额外设计状态检测和超时重试流程,代码因而变得复杂。结构化并发将这些底层异步细节封装在阻塞接口内部,机制开发人员可以编写诸如slides.goToPosition(LIFTED)、arm.extend()这样看似同步的语句,但在幕后,通过结构化并发管理多线程,保证动作顺序和并行安全。对此,Kuriosity Robotics(FTC 12635团队)应用了自己开发的Shuttle库,用Java的try-with-resources语法配合HardwareTaskScope实现结构化并发。通过scope.fork()开启子任务,再用scope.join()等待所有任务完成,任务间的异常和取消操作得到统一管理。
这样不仅代码简洁直观,还能充分发挥Java异常机制,使错误追踪变得直观和高效。结构化并发不仅改善了代码的可读性,更使得机器人的自动阶段编程变得轻松许多。复杂的动作序列不再需要冗长的状态机与轮询逻辑,而只需按自然的步骤调用阻塞方法,系统自动处理底层并发和异常。除此之外,结构化并发还带来了系统稳定性的提升。由于所有并发任务被约束在作用域内,异常抛出可导致所有子任务一并取消,避免资源泄漏和死锁,极大增强了程序健壮性。对比传统线程及锁机制,结构化并发减少了因竞争条件和不当同步所导致的潜在bug,降低维护难度。
结构化并发理念的提出,可以看作是对编程历史中“goto语句”的超越。正如Dijkstra和Knuth强调编写结构化代码的重要性,限制无序跳转带来的代码混乱,结构化并发也是对传统无结构异步设计的革新,其目标是让并行执行既直观又安全。它使机器人控制代码更贴合人类的思维模型——顺序执行中穿插可控的并行任务,帮助程序员免于深陷异步陷阱。然而,尽管结构化并发具有诸多优势,但它在机器人领域的应用还处于萌芽阶段。大多数机器人开发者仍习惯传统的异步设计模式或基于状态机的逻辑。引入结构化并发需要一定的学习成本,也需要机器人控制库和框架支持才得以广泛推广。
因此,推广结构化并发的最佳路径是通过示范和分享成功案例,让更多开发者理解其价值和具体实现。未来,结构化并发有望成为机器人控制软件设计的主流范式。机器人硬件抽象层可以进一步完善阻塞API,使得上层自动化逻辑真正摆脱异步思维藩篱。结构化并发能促进机器人代码的模块化、易读性和调试效率,推动机器人系统变得更加强大和可靠。借助现代Java语言对多线程和异常机制的支持,再结合结构化并发框架,机器人程序员将能以更自然的方式控制复杂机械系统,有效应对各种意外和故障场景。综上所述,结构化并发为机器人控制带来的改变是深刻且积极的。
它简化了并行任务管理,使同步编程重新焕发活力,同时保留了异步执行的性能优势。结合实际编码经验和理论分析,结构化并发不仅提升了机器人控制代码的质量,也为机器人程序员提供了更优雅、更安全的工具和思路。随着机器人技术日益复杂和多样,结构化并发无疑是迈向未来智能机器人控制的重要里程碑。期待更多团队采纳和贡献此领域的创新,推动机器人编程朝着更高效、可维护和智能的方向发展。









