随着人工智能和机器人技术的快速发展,机械手作为机器人系统中至关重要的部分,正得到越来越多的关注。作为连接机器人与外部环境的关键载体,机械手不仅决定了机器人的操作灵活度,还直接影响其应用范围和效果。传统的机械手通常价格昂贵,结构复杂,且驱动方式多依赖外部电机和钢丝缆线传动,这在制造和维护上都带来了挑战。近年来,开源机械手的兴起为机器人手部技术注入了新的生机,以更低的成本和更灵活的设计理念,推动了机器人手部技术的普及与创新。开源机械手项目通过开放设计图纸、代码和制造流程,极大地降低了机器人开发门槛,使得各类研究者和爱好者都能够参与到机械手的研发与改进之中。其中,开源机械手在结构设计方面普遍采用模块化、多自由度的理念,旨在实现类似人手的灵活性。
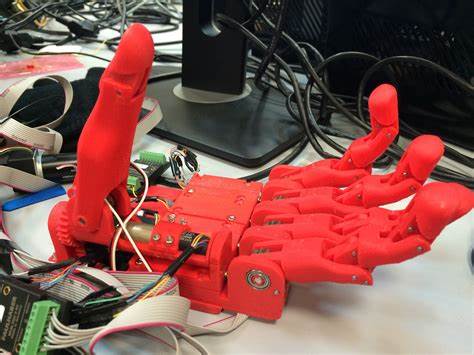
一款典型的开源机械手通常拥有多达八自由度,具备多个灵活的关节和节段,例如具有两节关节的多指设计,不仅能够完成基本的抓握动作,还能执行复杂的指尖操作和协调运动。采用并联机构的设计方式,使得每根手指配备独立的驱动单元,从而实现多维度的运动控制。驱动电机多选用小型伺服电机,集成于机械手内部,避免了传统机械手依赖臂部外置驱动器和拉索传动的局限,提升了结构的整体紧凑性与可靠性。材料方面,开源机械手大量应用3D打印技术实现零件的快速制造与定制。使用柔性塑料覆盖手部表面,不仅增加了机械手的适应性和亲和力,还降低了重量,典型机械手重量控制在400克以内,极大减轻了机器人系统整体负重。3D打印的优势还体现于设计迭代的便捷性,用户能够根据自身需求调整手指长度、关节结构甚至整体架构,实现高度个性化定制。
控制系统方面,开源机械手提供了多种控制方案以适应不同用户和应用场景。常见的控制方式包括基于串行总线通信的Python脚本以及基于Arduino平台的驱动控制,确保机械手能够轻松对接主控系统,实现精准而灵活的动作编程。以实际应用为例,开发者可以借助开源代码调试与校准手指运动,实现基本的握持、放置等智能动作,同时还可以逐步引入运动学算法,完成复杂的逆向运动学和前向运动学控制,提升机械手的操作智能水平。除此之外,开源机械手还支持多机械手的联合控制,例如同时控制左右两只机械手独立完成复杂任务,极大增强了机器人的交互能力和任务执行效率。在动力供应上,机械手常以来配备独立的外部电源模块,满足伺服电机对稳定电流的需求,保证机械手能持续稳定地完成动作。一些开发者甚至在制作专用的电路板以集成电源管理和总线转接,进一步提升系统集成度。
虽然开源机械手在设计与实践中取得了显著成果,但仍面临一定的挑战和改进空间。当前其机械结构在长时间复杂动作执行时的耐久性尚有待检验,软壳材料的弹性和耐磨性需要进一步优化以匹配实际工业应用的需求。此外,智能化水平仍需提升,未来将更多地依赖于传感器的集成,例如加入力觉传感器和温度反馈,实现更智能的抓取策略和自主调节能力。未来,结合开源机械手的灵活结构与先进的传感器融合技术,将有望打造出具备逼真触觉反馈、主动感知环境的高性能机器人手部,为智能制造、医疗康复、服务机器人等多领域带来革新。开源机械手项目通过社区的力量,持续推动硬件设计、驱动控制、应用算法的协同发展,为机器人技术的发展树立了优秀的范例。作为机器人技术爱好者和专业开发者,参与到这样的项目中不仅能够获得先进的技术资源,还能借助开放合作的模式,共同探索机器人手部技术的未来。
总之,开源机械手以其低成本、高自由度、开放透明的特点,正在成为推动机器人技术普及和创新的重要力量。依托3D打印制造和智能控制算法的结合,机械手正逐渐向人类手部的细腻动作和灵活操作靠近。随着持续改进和技术突破,开源机械手必将激发更多应用场景与商业潜能,为打造未来智能机器人奠定坚实基础。