机器人控制作为现代科技的重要组成部分,正日益渗透到工业制造、医疗护理、服务行业甚至家庭生活中。要理解机器人是如何被控制的,首先需要掌握机器人控制的基本概念和核心技术。机器人控制本质上是通过硬件与软件的协同工作,实现对机器人运动与行为的指令传递和管理,从而完成预设任务。控制过程涉及感知、决策和执行三个关键环节。感知部分依赖于多种传感器,如摄像头、距离传感器、力觉传感器等,能够实时收集环境信息和机器人自身状态数据。通过这些信息输入,机器人能感知周围环境的变化及自身运行状况,形成反馈基础。
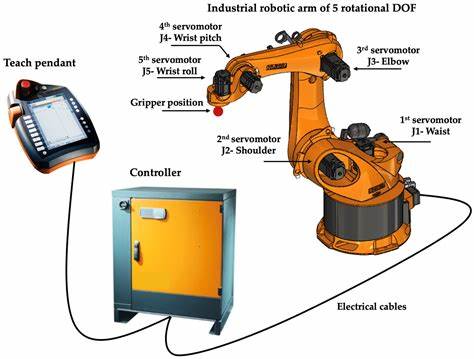
随后,控制系统中的决策模块会根据接收到的信息,运用算法和控制模型进行处理和判断。这通常涉及路径规划、运动学计算、动力学建模以及人工智能技术,确保机器人做出最优动作选择。最后,执行模块将指令传达给机器人关节、电机或其他执行器,实现具体运动或操作。多种控制策略被广泛应用于机器人领域,其中包括开环控制与闭环控制。开环控制基于预设命令,简单易实现,但缺乏反馈机制。相比之下,闭环控制通过实时反馈调整动作,能够纠正误差,实现更高精度和稳定性。
PID控制作为经典的闭环控制方法,因其简单且有效,被广泛用于机器人运动控制中。随着计算能力提升和人工智能的发展,先进的控制方法如模糊控制、神经网络控制以及强化学习逐渐应用于复杂机器人系统,使其在不确定环境下也能灵活自适应。通信技术在机器人控制中也扮演重要角色,尤其是在远程操作和多机器人协作场景。控制指令和实时数据通过无线网络传输,确保机器人能够快速响应和协调工作。工业机器人一般采用专用的实时控制系统,保障指令的及时性和稳定性。除了控制技术本身,机器人操作界面设计也是实现有效控制的关键。
操作界面可以是图形化的软件程序、基于手势的交互系统,甚至语音识别控制,使得操作者能够直观地制定控制策略和监测机器人状态。随着智能化的不断推进,越来越多机器人开始具备自主决策能力,能够根据环境变化自动调整动作,这一过程依赖于复杂的控制算法与感知系统的深度融合。控制精度和响应速度是衡量机器人控制系统性能的重要指标。高精度控制保证机器人能完成精细操作,如手术机器人操作微创手术;快速响应能力使其能在动态环境中避免碰撞或调整执行计划。未来,机器人控制将朝向更多的人机协作、更加智能、环境适应性更强的方向发展。边缘计算和云计算的结合,允许运算和数据管理更加高效,增强机器人在复杂环境中的处理能力。
同时,机器学习技术将使控制系统持续优化,提升自主性和灵活性。了解机器人控制的工作原理,不仅有助于技术研发人员设计更优控制系统,同时也让广大用户更好地理解和应用机器人技术,推动机器人产业的健康发展。 。