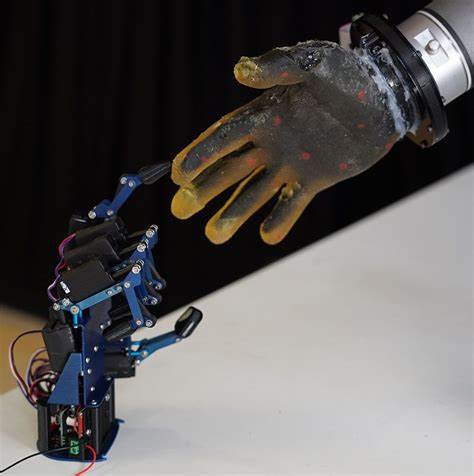
随着人工智能和机器人技术的飞速发展,赋予机器人类似人类的感知能力成为科研领域的重要目标之一。触觉作为人类感知世界的关键方式,不仅帮助我们感知物体的形状、温度和质地,还能在复杂环境中提供精确反馈。然而,传统的机器人触觉传感器普遍存在成本高、结构复杂、功能有限等问题。近期,剑桥大学与伦敦大学学院(UCL)的科学家们联合研发出一种基于单一材料的电子皮肤,为机器人带来了更接近于人类皮肤的触感体验,标志着机器人触觉系统迈出了革命性的一步。研究团队利用一种柔软且具有导电性的明胶基水凝胶材料,通过“熔融-成型”技术将其塑造成类似人手的形态,并在腕部安装了32个电极。这种设计让材料内部形成超过86万个微小导电通路,能够实时捕捉多种物理信号,实现多模态触觉感应。
电子皮肤通过探测压力、温度以及机械损伤等多种物理刺激,将复杂的环境信息转化为电子数据,帮助机器人精准判断不同的触摸类型。与传统触觉传感器需要多种专门设备分别检测压力、温度等诸多参数不同,单材料电子皮肤通过多模态感应技术,在一个材料层上完成多功能检测,结构更简洁,制造更经济,且提升了整体的耐用性和灵活性。为了优化触觉识别的准确率,研究团队借助先进的机器学习算法,分析数百万条电信号数据,并训练机器人能够区分不同的触摸方式,比如手指轻敲、热风加热、尖锐物体割伤或多点同时接触。尽管目前电子皮肤的灵敏度尚未完全达到人类皮肤的高度,但其表现已经优于现有市面上的多种机器人触觉技术。相比以往复杂且苛刻的制造流程,单一材料电子皮肤呈现出更高的可制造性和适应性,这为其在更广泛的工业应用奠定了坚实基础。未来,电子皮肤有望广泛应用于类人机器人、仿生假肢、汽车制造和灾害救援等多个领域。
在类人机器人方面,拥有精细触觉的电子皮肤可让机器人在医疗辅助手术、服装试穿以及复杂物理操作等场景中更得心应手;在仿生假肢领域,赋予义肢触觉反馈不仅提升用户的使用体验,也加强了假肢与人脑的交互;汽车行业则可以利用电子皮肤加强自动驾驶系统对环境的感知;灾害救援机器人则能通过感知复杂环境中的多样触觉,完成更安全有效的救援任务。尽管单一材料电子皮肤已展现出诸多优势,研发团队仍在致力于提升材料的耐久性和感应的灵敏度,确保电子皮肤能够适应更具挑战性的应用环境。与此同时,进一步的实地测试和优化也在进行中,以推动这项技术尽快走向大众市场。该项研究不仅体现了材料科学与人工智能技术的深度融合,更彰显了跨学科协作推进科技创新的无限潜力。剑桥大学和UCL的团队通过探索多模态信息处理机制,为未来机器人与环境的互动开辟了全新可能。电子皮肤的诞生是机器人技术升级中的一个里程碑,它不仅带来了更智能、更灵敏的感知能力,也让机器人具备了前所未有的“触觉”。
这种由单材料构成的电子皮肤,因其高效简洁的设计理念,正逐渐成为机器人感知系统发展的新范式,同时推动智能机器更好地融入人类生活。随着科技的不断进步,我们有理由相信,触觉电子皮肤将在未来打开机器人感知世界的新篇章,助力人工智能技术迈向更加人性化和智能化的新时代。