在人工智能和机器人技术迅速融合发展的今天,自然语言交互成为提升机器人智能化水平的重要方向。基于此背景,一位开发者打造了针对TurtleBot3机器人的AI代理,实现了通过自然语言对机器人进行直观、精准的控制。这一创新不仅极大提升了机器人操作的便捷性,也为未来智能机器人在人机交互领域的应用铺设了新路径。 TurtleBot3作为业界广泛使用的开源服务机器人平台,因其高度可定制性和完善的生态系统备受开发者青睐。然而传统上,控制TurtleBot3机器人通常依赖于复杂的编程和指令输入,限制了其在非专业用户中的普及性。此次推出的AI代理通过集成大型语言模型(LLM),让用户能够用自然语言表达控制意图,机器人则解析指令并调用相应的功能模块完成任务,大幅降低了使用门槛。
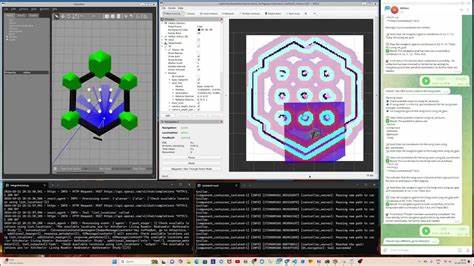
整个系统基于ROS 2 Humble Hawksbill版本开发,核心运行环境为Python 3.10+。用户只需通过简单的命令行配置,即可将自己的API密钥(如OpenAI、Anthropic等)注入环境变量,实现AI模型的无缝接入。系统支持多种主流大语言模型,赋予机器人灵活的语言理解和决策能力。开发者提供的工具集涵盖运动控制、传感器数据获取、环境感知等多个维度,机器人能够根据自然语言指令,完成从定位导航到障碍检测、图像采集等复杂任务。 例如,用户只需向机器人发出“请移动到坐标(2.0, 2.0),然后检查周围是否有障碍物。如果发现障碍物,请拍摄图片并返回起始点”的指令,系统即可自动解析动作顺序,调用移动工具模块控制机器人精准导航,同时利用传感器工具捕获现场图像。
此功能演示极大体现了机器人智能化协同与多任务处理的潜力,也增强了机器人在实际环境中的应用适应性。 此外,开发者特别开放了“tools”目录下的多种功能模块,包括数学计算模块、状态获取模块、运动管理模块以及传感器操作模块,确保AI代理能够多方位调度资源完成指令。此类设计不仅实现了高度模块化,方便后续扩展与维护,也让机器人具备更强的上下文理解能力和执行效率。 为了便于调试和性能追踪,系统还集成了LangSmith的追踪功能,通过相应环境变量配置,开发者可实时监控AI代理的推理流程及工具调用细节,大幅提升排查难点和优化算法的效率。这种链式调试模式为未来智能机器人复杂行为的开发提供了宝贵参考。 得益于开源协议的支持,该AI代理完全免费且对开发者友好,拥有可扩展性强、适用场景广泛的优势。
无论在教育科研、工业自动化,还是智能家居领域,TurtleBot3的智能化控制方式都具备极大的应用潜力。未来通过引入更多传感器类型及高级规划算法,将使机器人更加具备环境适应性和决策灵活性。 自然语言交互的机器人技术不仅代表着智能化的趋势,更为机器人普惠化和易用化打下坚实基础。依托大型语言模型与机器人操作平台的深度融合,用户无须具备复杂的编程技能,便能以直观语言实现机器人复杂动作,大幅提升了人机交互的效率和体验。该项目的成功实践为业界提供了宝贵的示范效应,同时激发了更多开发者投身于智能机器人交互技术的创新探索。 总而言之,通过构建专为TurtleBot3设计的AI代理,实现了自然语言到机器人执行的高度自动化桥接。
该系统在结构设计、功能实现及应用展示等多方面均展现出较强的竞争力和潜力。随着相关技术持续迭代升级,未来智能机器人将更好地服务于多样化生活与生产场景,真正实现人与机器的无缝协作。对研究者和实践者来说,探索如何进一步优化语言理解、感知融合及行为规划,将是推动机器人迈向更智慧时代的重要课题。