自动驾驶汽车(Autonomous Vehicles,简称AV)正日益成为未来交通的重要力量,其安全性和可靠性备受关注。作为关键的环境感知设备,激光雷达(LiDAR)通过发射激光束创建高精度三维环境模型,帮助自动驾驶系统识别道路、障碍物和行人。然而,近期一项来自学术界的突破性研究揭示了一种利用"镜面"来欺骗激光雷达的新型攻击方式,令人震惊地展示出自动驾驶系统的脆弱性。该类攻击不仅成本低廉,而且不依赖电子设备,真实环境中即可实施,严重影响车辆的感知和决策。本文将详细解析镜面激光雷达欺骗技术的工作原理、实践测试及潜在防御措施,助力行业更好地理解和预防未来攻击风险。 激光雷达作为自动驾驶车辆的"眼睛",其原理基于激光光束发射及反射测距,通过捕捉反射回来的信号计算与物体的距离,从而形成车辆周围环境的三维点云图。
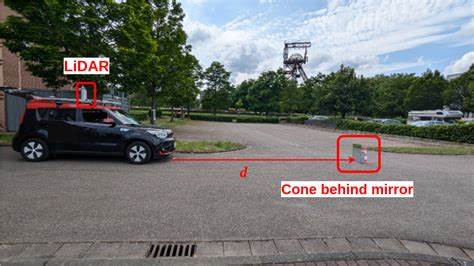
然而,本次研究的团队发现,利用如平面镜面等高反射率的表面,可以改变激光束的路径,制造虚假障碍物或隐匿真实物体,导致车辆感知系统产生误判。这种攻击被称为镜面激光雷达欺骗(Mirror-Based LiDAR Spoofing)。 镜面欺骗主要包含两种攻击目标:一是"物体添加攻击"(Object Addition Attacks,OAA),通过镜面反射创造出虚假的障碍物;二是"物体移除攻击"(Object Removal Attacks,ORA),利用镜面隐藏真实障碍物,使其未被检测到。这两者均极具危险性,可能诱使自动驾驶车辆采取错误的避让策略,增加交通事故风险。 研究人员构建了详细的几何光学模型,以推演激光束照射及反射过程,确保攻击的可行性和有效性。随后,他们在户外真实环境中进行了多次测试,使用市售激光雷达传感器及搭载Autoware自动驾驶软件的车辆进行实验。
实验结果显示,当激光束被平面镜反射后,车辆的感知系统生成的环境网格图出现严重混乱,假障碍物频繁出现或真实障碍物被误判消失。此外,车辆在路径规划和控制上产生不安全反应,凸显攻击的危害性。 为验证攻击技术的规模化可行性,研究团队利用CARLA模拟器模拟了大量攻击场景。虚拟环境中的测试进一步证明了镜面欺骗技术的稳定性和破坏力,表明此类攻击极易被放大并应用于现实世界。 面对这种低成本且无需复杂设备的攻击方式,防御措施显得尤为重要。研究提出了多种可能的防御策略,包括整合热成像传感器以确认物体热信号、多传感器数据融合提升环境感知的抗攻击力,以及利用光指纹技术识别激光回波的真实性。
然而,每种方法均有其局限性,如成本上涨、系统复杂度增加或依赖额外硬件支持,使防护策略的实际应用面临挑战。 镜面基激光雷达欺骗的发现警示了自动驾驶技术安保的新趋势。攻击者无需复杂电子设备即可执行远程物理攻击,迫使行业必须重新审视传感器安全体系设计。未来,除了加固传感硬件,软硬件融合的智能防护系统或许成为主流方向,例如借助机器学习区分异常点云,加强实时异常检测和防御响应能力。同时,法规层面也需加强传感器安全审核,促进行业标准化发展,保障自动驾驶的安全运行。 此外,该研究提醒公众及决策者,激光雷达虽具备强大环境感知能力,但并非无懈可击。
自动驾驶的发展应兼顾技术创新与安全防护的平衡,避免单一传感器依赖,推进多模态传感器融合体系,提升整体系统鲁棒性。只有如此,自动驾驶汽车才能真正实现方便、安全与信赖的广泛应用。 镜面激光雷达欺骗为自动驾驶安全敲响警钟,同时也引发了对智能交通新安全威胁的广泛关注。随着相关研究不断深入与技术持续攻关,相信自动驾驶系统必将构建更完善的防御机制,抵御未来更复杂的攻击手段,推动智能交通向着更加安全、智能的方向发展。 。