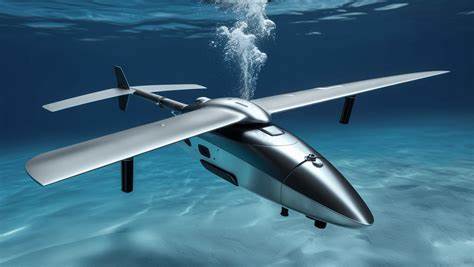
随着无人机技术的不断进步,混合空中与水下无人机的概念日益成为科技研发的热点。这类无人机能够在空中自由飞行,同时具备在水下潜航的能力,为海洋探测、环境监测以及灾害救援等领域带来了前所未有的机遇。推动这一技术发展的核心在于其独特的推进系统设计,如何在两种截然不同的环境中高效转换并保持优异性能,成为科研人员和工程师们热衷解决的关键问题。 传统的无人机推进系统多以电动螺旋桨为主,适合在空气中获得动力,但水下环境对推进方式有着截然不同的要求。水的密度大约是空气的八百倍,阻力显著增加,螺旋桨即使体积较大,也难以在水中持续高效推力输出。而水下无人机普遍采用螺旋桨、喷水推进器甚至活塞式推进机构,以适应各种水质和运动需求。
混合无人机的挑战在于如何设计一套可同时在空中和水下运行的推进系统,确保设备在两种介质之间切换自如且损耗极小。 近年来,许多创新思路被提出,如采用可变形螺旋桨、双模推进器集成或智能切换机制等。例如,有的无人机设计中使用了可以折叠的推进螺旋桨,飞行时展开产生推动力,入水后则转入水下模式,配合特殊密封装置防止进水。还有的研究利用特殊的电机与传动技术,在保持体积紧凑的前提下,实现水下高效推进。同时,推进系统的材料选择也十分关键,防腐蚀及耐压性能直接影响无人机在海洋环境的可靠性与使用寿命。 从动力源来看,电池能源的优化同样至关重要。
为了满足长时间、多环境的任务需求,推进系统需要极高的能效比。当前,锂电池技术逐步成熟,但在水下高压和温差大的情况下,电池性能易受影响。部分研发团队致力于开发适用于海洋环境的特殊电池包,结合智能管理系统监控电量与温度,确保推进持续稳定。同时,借助太阳能等可再生能源技术补充动力,为混合无人机的长续航提供更多可能。 智能化控制系统是提升混合推进性能的重要保障。无人机必须精准侦测自身所处环境,实时调整推进模式和功率需求。
此外,对流体力学的深入理解促使研发人员不断优化动力布局以减少不必要的能耗。例如,在水下状态下调整翼型以减少阻力,或是在飞行时利用空气动力效应提升升力。先进的传感器和算法确保无人机在空水界面切换时平稳过渡,从而避免因推进突然转换而导致的动力失衡。 混合空中与水下无人机的应用前景广阔。海洋资源勘探是其中一个重要方向。传统海洋探测设备往往依赖专门的水下载具或单纯的无人飞行器,存在数据采集不连续或效率低的问题。
混合无人机可快速飞抵海域,再潜入水下完成细致测绘,极大提升了任务效率与数据准确度。此外,在海洋环境保护中,混合无人机能够实时监测水体污染、海洋生物活动以及渔业资源状态,有助于科学家制定更合理的保护策略。 在救援和安全领域,混合无人机同样有独特优势。海难事故发生时,空中无人机可以迅速到达现场进行空中侦察,定位被困人员或危险物资。随后,潜入水中搜救或评估水下环境,支持整合救援方案的执行。这种多模式作业能力极大提升了紧急响应速度和操作安全性,同时减少了人工搜索的风险和成本。
制造成本及技术整合是混合推进技术商业化路上的障碍之一。高性能材料的采购、复杂机构的制造工艺以及专用软件的开发均对资金与技术能力提出了较高要求。然而,随着全球无人机市场需求的攀升和技术门槛的不断降低,相关企业与研究机构正加速合作,推动技术成熟和规模生产的实现。与此同时,政策支持和产业链完善也为混合无人机的创新发展提供了有力保障。 展望未来,混合空中与水下无人机推进技术将朝着更加智能化、节能化和适应性强的方向发展。人工智能与大数据技术的深入应用,将帮助无人机更好理解环境变化并自主优化推进策略。
新材料、新能源的引入,预计将为无人机的续航能力与耐用性带来突破。借助云计算平台和自动化控制系统,未来的混合无人机有望实现更加精准且高效的多任务协同作业。 总体而言,混合空中与水下无人机推进技术融合了航模工程、机械设计、材料科学、自动化控制以及能源管理等多学科技术,代表着无人系统创新应用的重要方向。其突破不仅将推动海洋科学、环境保护和应急救援等领域的变革,也为智慧城市建设、国防安全等提供更广阔的技术保障。随着技术的不断完善和产业链日益成熟,预计未来几年内混合无人机将进入更多实际应用场景,成为提升人类活动效率与安全的重要力量。