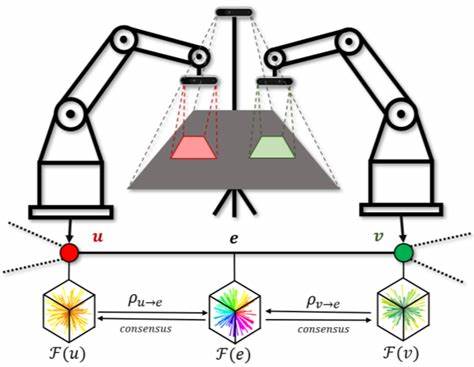
随着智能机器人技术的飞速发展,协同操作成为机器人领域的研究热点之一。多机器人协作不仅能够提升任务完成的效率和灵活性,还能实现复杂环境下的智能化响应。近日,Latent Theory of Mind(潜在心理理论,简称LatentToM)作为一种前沿的去中心化扩散架构,为多机械臂协作操作带来了全新突破。该架构通过创新的潜在空间表征和信息共享机制,让机器人具备类似人类"心理理论"的推断能力,实现分布式决策与协同而无需过度依赖显式通信或中心控制。LatentToM的核心优势在于为每个机器人都创建两个潜在向量:一个是特定于机器人的"自我嵌入"(ego embedding),反映其自身感知与状态;另一个则是"共识嵌入"(consensus embedding),旨在为所有机器人提供共享信息视图。这个设置使不同机械臂即使感知视角和传感信息有差异,也能在潜在空间中达成一致的行动理解和协作意图,赋予机器人协同操作时的高度柔韧性和鲁棒性。
架构训练过程采用了数学上先进的割层理论(sheaf theory)中的共边异同连通形式(first-order cohomology loss)指导对共识嵌入的对齐,保证了每个机器人所学习的隐空间一致性。这种基于拓扑数据分析的监督方法,强化了多机器人系统在多样化场景下共享信息的准确性和可靠性。同时,为了保持共识嵌入的表达力,设计了符合心理理论的结构限制和方向性共识机制,保证信息传递不仅流畅一致,同时兼具区别性,从而优化协作决策的质量。这一框架支持完全的分布式执行,即使机器人之间没有显式通信,通过观察彼此动作及其对环境的影响,隐式形成信息交互,极大地增强灵活部署的可能。另一方面,当具备通信能力时,共识嵌入可以在每次推理阶段同步共享,借助切层Laplacian算子进一步对齐,提升协作的即时性和准确度。在硬件实验中,LatentToM不仅超越了传统的去中心化扩散基线模型,还与最新的集中式扩散政策相媲美,展现出显著的实用价值和推广潜力。
其在双臂机械手的协作操作中表现尤为突出,有效完成了搬运、装配等复杂任务,彰显了技术的成熟度和适用广度。该架构的推广预计将大幅加速机器人群体在工业自动化、服务机器人、灾难救援及物流领域的应用发展。未来,随着传感器精度和车辆智能的提升,基于潜在心理理论的去中心化多机器人系统有望在更复杂的动态环境中实现无缝合作,释放机器人群体智能潜能。此外,该技术的理念也对人工智能领域中的多智能体学习、对抗训练等方向具有拓展意义,为跨领域协同提供范式借鉴。总而言之,Latent Theory of Mind通过结合前沿的数学理论、深度学习潜在表征和灵活的通信策略,为多机器人协作开启了新的可能。其独特的设计思路不仅在理论层面具有重要突破,在现实应用中同样展现了强大生命力。
随着更多相关研究的开展,未来机器人系统的智能协同将更趋高效、自然和自主,推动智能自动化进入一个崭新的时代。 。