随着工业自动化水平的不断提升,机器人在制造、物流以及服务业中的应用日益广泛。特别是在物体抓取与放置任务中,精确且灵活的机械臂控制成为核心竞争力。UR5机械臂配合Robotiq 85夹爪的组合,通过在仿真环境中的高效模拟,极大地推动了智能机器人抓取技术的发展。本文将系统剖析UR5与Robotiq 85的结合优势,深入探讨其在PyBullet仿真环境中实现物体抓取和放置的关键技术与创新方法。 UR5机械臂是Universal Robots推出的一款高性能协作机器人,以其安全、灵活和精确著称。搭载Robotiq 85夹爪,机器人能够模拟人手的抓握动作,适应多种形状和材质物体的抓取需求。
Robotiq 85的设计灵感来源于人类手指的运动机理,通过同步关节控制实现自然的开合动作,确保抓取过程平稳而可靠。 PyBullet作为开源的物理仿真引擎,为机器人控制算法的开发与测试提供了强大支持。其高效的物理计算能力和实时渲染保证了仿真过程的精准与流畅。在该平台上,UR5机械臂结合Robotiq 85夹爪的动作不仅能够精确还原实际工作环境,还能实现动态环境的自适应。 借助逆向运动学(IK),UR5机械臂能够根据目标物体的位置和方向计算出相应的关节角度,实现灵活且精准的臂部动作。逆向运动学算法通过数学模型推导,使机械臂能够快速定位目标并进行路径规划,确保机器人以最低的能耗和最短的路径完成任务。
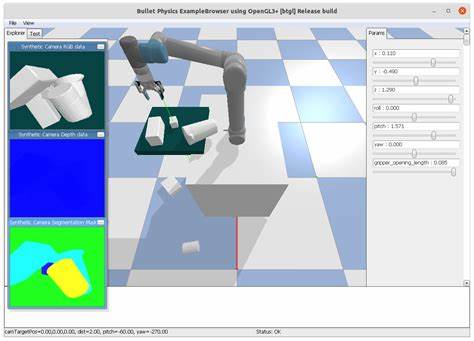
这种精细的控制机制极大提升了机械臂的作业效率和准确性。 在仿真环境中,机器人被赋予抓取随机生成的方块的任务。在每一次抓取动作中,机械臂先通过视觉传感器定位目标方块的位置,接着通过逆向运动学算法规划攻击路径。机械臂随后驱动Robotiq 85夹爪精准打开,包裹目标物体形成稳定抓握,最后将方块安全置放至托盘指定位置。该过程在PyBullet的实时界面中得以直观观察,用户可以随时调节视角,了解机器人的运行状态和环境交互效果。 该系统的设计充分考虑了现实应用中的不确定性,例如物体摆放的随机性、多样性以及环境复杂性。
机器人具备动态调整能力,能够根据实时反馈调整抓取策略和路径规划。Robotiq 85夹爪的同步关节控制保证了抓握动作的柔和与力度适中,避免对脆弱物体造成损坏,这在电子元件或零部件搬运中尤为重要。 技术层面上,UR5与Robotiq 85的结合展现了精密机械设计与先进算法的完美融合。UR5机械臂的六自由度设计保证了运动的多样性和灵活性,而Robotiq 85夹爪的三指抓握结构则模拟了人手的多种抓握模式。二者通过软件算法的有机集成,使机器人能够完成复杂的物体抓取与放置任务,极大扩展了协作机器人的应用边界。 PyBullet仿真环境不仅实现了物理实体的动作模拟,还通过实时反馈系统帮助开发者调优控制算法。
用户通过图形界面调整机器人参数、监控抓取动作与放置效果,从而达到提升整体系统性能的目标。这种闭环调控机制降低了机器人实验的设计成本和风险,实现了更快的技术迭代和应用普及。 从应用角度来看,UR5配合Robotiq 85夹爪的解决方案广泛适用于仓储物流、电子制造、装配线自动化以及医学辅助等领域。其高适应性使得机器人能够应对多种复杂抓取任务,如不同尺寸、材质物体的精准操作。此外,仿真技术的引入为培训机器人操作人员提供了安全高效的平台,促进人才培养与技术传承。 随着人工智能与机器学习技术的高速发展,未来的UR5机器人系统将可能实现更加智能化的自主学习能力。
通过深度学习算法优化逆向运动学模型和力控策略,机器人能够更好地理解并适应环境变化。与Robotiq 85夹爪的紧密协同有助于提升机器人抓取的灵巧度和稳定性,从而在更多复杂场景中展现卓越性能。 综上所述,UR5机械臂与Robotiq 85夹爪的结合通过PyBullet平台的物理仿真技术,为现代机器人抓取任务提供了高效、灵活且直观的解决方案。该系统不仅实现了精准的逆向运动学控制和自然的夹爪动作,还通过动态物体生成和实时交互展示了机器人操作的先进水平。随着相关技术的持续突破,未来这一组合必将在智能制造与自动化领域发挥更为重要的作用,为推动工业智能化升级贡献力量。