在动物行为学和认知科学领域,哈欠不仅是一种生理反应,更是一种具有复杂社会功能的行为。尤其在黑猩猩等灵长类动物中,哈欠的“传染”现象,即当一只个体看到另一只打哈欠时,自己也会随之打哈欠,已成为理解共情、模仿和社会连结的重要窗口。最近一项由国际研究团队开展的开创性研究揭示,即便面对非生物的仿生机器人,黑猩猩依然会出现哈欠传染现象,这为跨物种与跨主体的社会行为研究开启了全新局面。该研究深入探讨黑猩猩对具有人类外貌和动作特征的仿生机器人的行为反应,其结果不仅填补了人工智能与动物行为学交汇处的空白,也为理解进化视角下的社交认知机制提供了重要线索。 哈欠的生理与社会学意义已被广泛研究。其功能涉及从调节大脑温度、引发觉醒状态转换,到协调群体行动、促进社交同步等诸多层面。
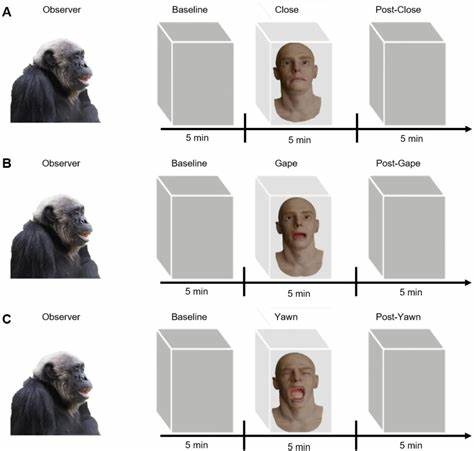
其中,“传染性哈欠”特别引人关注,因其可能反映了动物个体间的情绪共鸣和非意识层面的行为模仿。此前,哈欠传染多发生在同种个体间,如人类、黑猩猩、倭黑猩猩等。研究显示,社会关系密切的个体之间更容易发生哈欠传染,暗示了其与共情能力的潜在关联。但在此项新研究中,研究者将实验对象从生物主体扩展至具有人类脸部动作的仿生机器人(即“安卓”),探究黑猩猩是否会对非生物体的“哈欠”行为做出同样的反应。 实验中,研究团队开发出高度仿真的安卓机器人,能够精准模拟人类打哈欠的面部动作,包括口腔的张开大小、眼睛的闭合及眉头的微妙变化。实验设计包含三个条件:哈欠条件(Yawn),即机器人做出完整哈欠动作;张口条件(Gape),机器人张开嘴巴,但不构成哈欠;以及闭口条件(Close),机器人保持中性表情,嘴唇紧闭。
14只成年黑猩猩被分别暴露于上述条件下,并在观察机器人展示相应动作时,研究人员详细记录了黑猩猩自身的哈欠频率、张口动作及其它与休息相关的行为。 结果显示,超过半数参与实验的黑猩猩在观察安卓机器人执行完整哈欠动作时,表现出明显的哈欠传染反应。相比之下,在观测机器人仅张口或保持闭口的条件下,哈欠行为则显著减少甚至不发生。同时,黑猩猩在哈欠条件中表现出更多的休息相关行为,如拾取铺垫材料、筑巢以及躺卧,表明它们不仅模仿机器人动作,还可能将哈欠视为休息的环境提示。这一发现推翻了哈欠传染仅限于生物个体和熟悉模型的传统观点,提示非生物主体同样能够作为行为诱发源。 进一步分析表明,黑猩猩对安卓机器人的注意力在不同条件下并无显著差异,这排除了兴趣偏向或视觉刺激强度的影响因素,强化了哈欠动作的独特作用。
此外,实验设计通过控制条件顺序和时间,确保该效应非因偶然或疲劳积累所致。研究人员还观察到,呈现哈欠动作的安卓机器人虽然外在形象为非生物,但其动作模式的细腻设计激活了黑猩猩潜在的感知-动作耦合机制,促发了本能的模仿反应。 在科学意义层面,这项研究对多个领域产生了深远影响。首先,它证明了非人类灵长类动物不仅能感知并响应同类的社会信号,也能够对具有人类典型行为特征的机械装置做出情绪式反应,体现了“跨主体”的社会认知能力。其次,表明哈欠传染或许不完全依赖复杂的情绪认知或社会归属感,部分源于更为底层的感官-运动联动系统,这对于理解共情的神经基础极为关键。此外,这也提醒人工智能领域,设计具备生物特征和社会信号表达能力的机器人,可能更有效地促进人类及动物的互动接受度和亲和感。
从进化观点来看,哈欠的多功能性以及传染性可能是被长期保留的适应策略,不仅促进同种个体间的行为同步,也可能在异种间乃至非生物个体中具备促进环境适应和社交沟通的功能。机器人作为连接生物个体与人工智能系统的桥梁,成为认知科学实验中的理想工具,可操控地展示具有特征的社交线索,帮助揭示内在的心理机制。 在实践应用方面,理解动物对机器人社交信号的反应有助于野生动物保护和动物园环境设计。例如,通过利用仿生机器人的社交行为,可以减少动物孤独感,促进群体稳定。对于人工智能的未来发展,也意味着设计友好且易于被不同物种接受的机器人,将为多物种共存环境中的协作开辟新途径。 然而,该领域仍存在众多未解之谜。
黑猩猩为何对机器人哈欠作出反应?是出于模仿驱动的感知-运动耦合,亦或源于某种形式的情感投射?传染性哈欠与共情之间是否存在必然联系?未来研究需结合神经科学技术,深入探讨感染路径和脑区激活,以及鉴别外部动作特征对行为触发的阈值和条件。此外,不同种类的非生物动作是否也具有类似的社交影响力?是否存在机器人设计能更精准激发动物的社交回应机制?这些问题将推动跨学科研究不断前进。 总而言之,黑猩猩观察仿生机器人打哈欠时表现出的传染性哈欠,代表了动物行为学、认知科学与人工智能交汇处的一项重大突破。从非生物体角度验证社会信号的效力,为重新理解社交行为的进化与机制注入新动力。未来,随着科技和科学方法的进一步融合,跨主体的社交认知研究有望揭示更多生命之间微妙且深刻的联结,为构建人与自然及人工智能和谐共生的世界奠定理论基础。