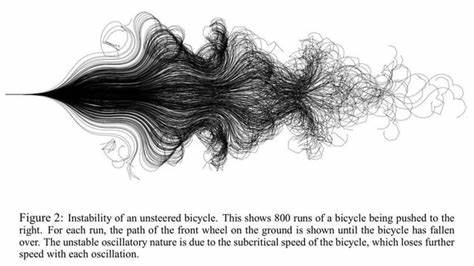
自行车作为日常生活中最普遍的交通工具之一,长久以来受到科学家和工程师们的关注和研究。尽管骑自行车看似简单,但其背后的物理学和控制机制却极为复杂。2018年,加州理工学院的研究者马修·库克对800辆无人自行车被推动直到倒下的路径进行了系统研究,试图揭示骑行时保持平衡的深层次原理。通过这项实验,科学家不仅创新地模拟了自行车的动态运动轨迹,还成功地运用人工智能技术尝试控制自行车,探索未来智能骑行技术的无限可能。 研究的灵感源自库克本人在骑乘虚拟自行车时的困惑。虚拟自行车模拟并不能准确还原现实中骑行的体验,让他意识到很多关于人体感知和平衡调节的认知存在缺陷。
在真实骑行中,人类不仅依赖视觉,还通过本体感觉、惯性反馈以及微妙的身体倾斜动作来维持稳定,这些信息在虚拟环境中被大大简化或者丢失。为了更好地理解这些复杂的反馈机制,库克和他的团队设计了这项实验,推动无人驾驶的自行车,观测其在失去控制后沿着怎样的轨迹倒下。 实验中,研究人员并未操控自行车方向,而是让它们在不同的速度范围内自由滑行,直至因失去平衡而倒地。收集到大量的轨迹数据后,研究团队对这些路径进行数学建模,形成了一幅细致描绘自行车前轮运动轨迹的图像。研究发现,当自行车速度降低至临界值时,其运动轨迹表现出不稳定的振荡,体现出动态系统向平衡失稳转变的过程。这种振荡模式以其独特的节奏和形态,令人惊叹地展现了物理规律下的自然美感与复杂性。
自行车动态学是一门集物理学、工程学和控制理论于一体的交叉学科。骑行时需要实时调整车身倾斜角度和转动车把方向,以应对各种速度变化和环境条件。传统的自动控制算法难以准确模拟和预测自行车的平衡状态,这也让自动骑行自行车的研发面临巨大挑战。为了突破这一瓶颈,库克团队引入了人工神经网络的概念,尝试用简单的两神经元网络来控制无人自行车。 神经网络作为人工智能中的核心技术之一,模拟了人类神经系统中的信息处理方式。通过训练,网络能够逐步调整自身权重,提高完成特定任务的能力。
在这项研究中,两神经元网络被用于学习如何平衡自行车、调整前轮方向并保持稳定前进。通过不断反复尝试和分析,网络能够掌握如何在不同速度下控制自行车的行进方向,并能将车头导向预设的目标位置或沿着指定路径行驶。 尽管模型表现出了令人鼓舞的学习能力,但在低速行驶或转弯过急时,控制效果仍然不够理想。这表明自行车的低速稳定性和复杂转弯动作涉及更多细微调节,单纯的简单神经网络难以完全胜任。未来的研究需要引入更高级的网络结构和更多维度的感知输入,以更精细地模拟人类骑行时的动态反馈和调整策略。 库克强调,虽然当前模型已经通过部分人工输入进行了指导,但长远目标是让计算机能够在最少的跌倒次数中自主学习,不断优化骑行策略,实现真正意义上的智能骑行。
这样的系统不仅对自动驾驶自行车技术有重大推动意义,也为机器人学和智能控制领域提供了宝贵的研究范例。 未来,研究团队计划将模型应用于不同型号和结构的自行车,以了解车型差异对控制策略的影响。此外,结合感应器技术和机器视觉,实时采集环境和车况数据,将极大提升模型的适应性和稳定性。智能骑行技术的发展还将促进共享单车、无人配送等多元化应用,推动绿色出行和城市交通智能化发展。 这项研究不仅揭示了保持自行车平衡的内在物理机制,更为理解人类复杂的运动控制能力提供了新视角。它融合了传统动力学和现代人工智能技术的优势,催生了创新的解决方案。
通过不断深化对骑行过程的解析,未来我们有望打造出更智能、更安全、更高效的骑行体验,让无人自行车技术迈上全新的台阶。 总之,探索无人自行车倒下时的路径轨迹,不仅是理解骑行平衡的关键一步,也是推动自动化交通领域的重要探索。随着神经网络和机器学习技术的不断进步,自动控制和平衡技术将变得越来越成熟,使得骑自行车这一生活技能在智能时代焕发新的生命力。 。









