大象鼻子是大自然赋予的奇迹之一,作为世界上体积最大、结构最复杂的肌肉水套器官,其集成了超过九万条肌束,实现了无与伦比的柔韧性与精准控制。几十年来,这一器官以其卓越的运动功能和多样的动作方式吸引了众多科学家和工程师的目光。大象鼻子不仅能够进行细微精密的操作,如摘取水果,更能展现出极大的力量,例如提起沉重的树干。这一独特的生物结构为仿生软体机器人设计提供了宝贵灵感,同时也激发了材料科学和生物力学的深度研究。尽管如此,针对这一复杂肌肉网络的微观活动与宏观动作之间联系的精确物理模型长期缺失,限制了对大象鼻子运动机制的全面理解。近日,斯坦福大学、生物学及数学领域的多所顶尖机构联合研发出一套超快速的物理学基础建模方法,填补了这一研究空白。
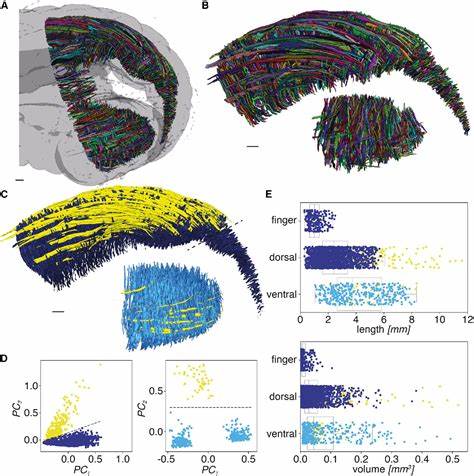
在这项突破性研究中,研究团队结合连续介质力学的基本原理与纤维激活形变理论,利用降维方法将大象鼻子简化为一个主动细长结构模型,从而实现了在有限变形条件下对其弯曲与伸展的闭式解算。该模型不仅嵌入了复杂肌肉架构的物理本质,还大幅降低了计算成本,使得对庞大状态空间的快速筛选成为可能。研究团队进一步通过高分辨率磁共振成像技术,构建了大象鼻子的数字三维模型,细致分析不同肌群激活对整体运动形态的影响。此外,科学家们还针对三种典型动作场景——摘果、对称提起树干及非对称提举树干,开展逆向运动问题求解。借助优化算法提取关键肌肉激活模式,结果表明大象在达到部分肌肉最大收缩后,能够自发调节其他肌肉群的活动,实现任务的精确完成。这一发现不仅深化了对大象鼻子协调机制的理解,也为设计高效、柔软且响应迅速的机器人和可穿戴辅助手段铺平了道路。
不同于传统依赖庞大计算资源的模拟,超快速模型凭借其物理合理性和计算效率,尤为适用于实时反馈控制和快速动作仿真,极大地推动了软体机器人领域的发展。大象鼻子的研究成果不仅对生物学及力学领域产生深远影响,更在材料科学中为开发新型柔韧材料提供理论支持。借助这套模型,科学家可通过量化肌肉激活对细微动作的贡献,设计出模仿大象鼻子灵活多变的高性能软体系统。未来,这种基于物理的低维度肌肉驱动模型有望推广到其他肌肉水套结构,如章鱼腕足、灵长类动物的舌头等,极大提升理解和仿真能力。总的来看,此项研究标志着大象鼻子生物力学研究进入了新时代。它不仅填补了生物结构微观活动与宏观运动之间的理论鸿沟,也为多领域交叉创新提供了坚实基础。
随着软体机器人技术的快速发展和生物医学辅助设备需求的增长,精准且高效率的物理建模势必成为关键支撑。探索象鼻复杂肌群之间的协调方式,解锁物理驱动动作的本质,将推动更多智能设备的诞生,造福社会与科技进步。面对未来,随着成像技术和计算方法的不断进步,研究人员期待进一步细化模型,增强其预测精度和适用范围,助力不同行业实现跨越式发展。