随着机器人技术的快速发展,类人机器人作为机器人领域的一个重要方向,受到了学术界和工业界的广泛关注。然而,当前市场上的大多数类人机器人硬件成本高昂,同时设计封闭、缺乏透明度,这些都限制了该领域的普及和用户的创新空间。伯克利Humanoid Lite应运而生,旨在通过开源和模块化的设计理念,打造一款高性价比、易于定制、适合教育与研究的3D打印类人机器人,为机器人技术的民主化贡献力量。 伯克利Humanoid Lite由加州大学伯克利分校的科研团队开发,其核心亮点在于采用了3D打印技术制作机器人的关键结构件和传动系统。通过在标准桌面3D打印机上的打印,配合从全球电商平台采购的组件,整套机器人硬件成本得以控制在5000美元以下。这样的价格远低于市面上许多类人机器人产品,有效降低了使用门槛,使得教育机构、独立研发团队甚至机器人爱好者均可承担并开展相关研究与应用。
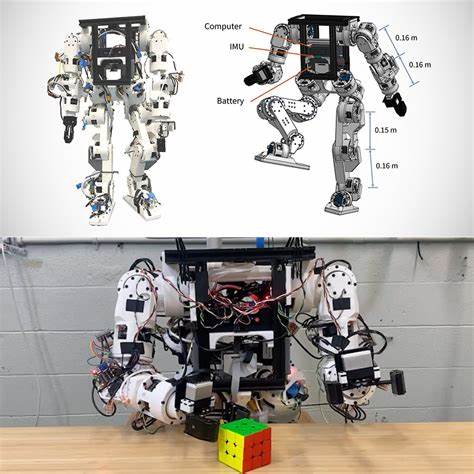
在设计细节方面,为了克服3D打印材质在强度和耐用度方面的局限,伯克利团队创新性地采用了轮廓齿轮(cycloidal gear)结构作为传动核心。该结构相比传统齿轮具有更优异的力学表现,能够有效应对运动过程中产生的高应力,保证机器人的运行稳定性和使用寿命。同时,模块化设计极大提高了零部件的拆卸、替换和升级效率,用户可根据实际需求灵活调整硬件配置,获得更具个性化的机器人平台。 作为一款开放源码机器人,伯克利Humanoid Lite不仅免费公开完整的硬件设计图纸,还提供了嵌入式控制代码、运动控制框架以及强化学习的训练与部署工具链。这让全球的开发者能够基于相同的平台进行二次开发、实验验证和技术创新,推动类人机器人技术的快速进步。团队还通过一系列实验展示了该平台的综合性能,包括机器人用手掌转魔方、用马克笔书写自我名字以及玩积木等,展现了其精细的运动控制能力。
此外,机器人在双足行走任务中,通过强化学习实现了从模拟环境到实际硬件的零样本策略转移,充分体现平台在仿真与现实之间的有效连贯性。 伯克利Humanoid Lite的研发背后得到了多项国家科研基金的支持,并融合了跨学科团队的协作力量。从项目初期的探索、试验,到后期的优化和平台搭建,每一步都凝聚了研究人员和技术专家们的智慧与汗水。尤其在齿轮设计、材料选择、运动控制算法开发等领域,团队突破了许多技术难点,创造了兼具性能与成本优势的机器人方案。 该项目不仅丰富了类人机器人开放平台的选择,也为全球科研机构和教育单位提供了宝贵的工具。相较于传统封闭的机器人产品,开放源码和3D打印组合的策略为学习和研究创造了更宽松的环境,有利于加速机器人技术的普及、创新和应用。
同时,社区活跃度不断提升,开放论坛和社交平台为用户提供了丰富的交流和支持资源,促进了全球范围内的合作与知识分享。 从性能角度分析,伯克利Humanoid Lite引入了一个称为“性能因子”的衡量标准,该标准包含机器人关节驱动力矩的平均峰值,结合机器人尺寸进行归一化,体现了平台在强度与运动表现上的综合衡量。与成本结合后形成的性价比指标,明确展示了该机器人在同价位产品中的竞争优势。这一指标系统化地量化了机器人设计在成本效益上的表现,为未来研究和产品开发提供了清晰的参考。 面向未来,伯克利Humanoid Lite将在开源社区的推动下不断完善,未来版本有望融合更多先进传感器、更高性能控制算法以及智能决策系统,进一步拓展其在教育、服务和研究领域的应用场景。同时,随着3D打印技术的进步和材料科学的发展,其机械结构的强度和耐用性也将持续提升。
通过持续的社区参与和产业链支持,Berkeley Humanoid Lite有望成为类人机器人研究和应用领域的重要基石。 总的来看,伯克利Humanoid Lite的推出不仅打破了现有市场需求的高成本壁垒,还从设计理念上推动了机器人硬件的开放化和模块化。其结合3D打印技术与现代机器人控制,打造了一个兼具性能、可访问性和经济性的创新平台。对教育者、研究人员和机器人爱好者来说,它提供了一个前所未有的机会,能够以较低成本探索先进的类人机器人技术,推动技术民主化进程。此外,随着全球机器人技术的不断演进,Berkeley Humanoid Lite的成功经验和设计思路也将为更多智能设备和自动化系统的开发提供示范和借鉴。作为机器人技术创新的里程碑,Berkeley Humanoid Lite开启了类人机器人更加开放、共享与合作的新时代。
。