PEZ糖果分发器作为一种经典的童年回忆,不仅以其丰富多彩的卡通造型吸引人,也因便捷的糖果发放方式深受大众喜爱。随着科技发展,自动化和智能化逐渐融入人们生活方方面面,传统玩具的智能改装成为电子爱好者们的热门课题。在这样的背景下,PEZ糖果分发器借助Arduino平台实现自动感应和发糖功能,不仅赋予了其全新的功能,也带来了极大的趣味性和实用价值。本文将带领读者深入了解利用Arduino打造PEZ机器人糖果分发器的全过程,包括所需硬件、焊接连接技巧、机械结构改造,以及核心控制代码的设计与优化。 首先,选择适合的硬件部件是项目成功的关键。Arduino Uno作为主控板,因其开源、易用且资源丰富,成为理想选择。
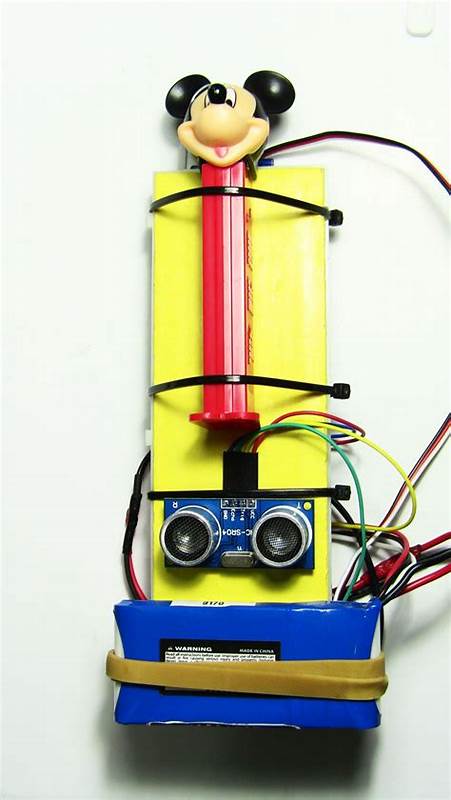
搭配HC-SR04超声波传感器,可以实现距离测量,检测是否有人靠近糖果分发器。RC舵机负责机械动作,使PEZ糖果分发器的卡通角色头部运动,推动释放糖果。此外,面包板、跳线等辅助元件为硬件连接提供便利,而电源部分则保证整体系统的稳定运行。为了获得最佳机械效应,选用带有明显耳朵结构的PEZ角色,比如经典的米奇老鼠款,可以利用耳朵作为连接点,将舵机臂通过细线固定,与卡通头部相连,实现灵活拉动动作。 硬件连接与安装过程中,正确对应引脚很重要。舵机的电源线连接到Arduino的5V和GND引脚,信号线接至数字9号引脚,实现角度控制。
超声波传感器的TRIG和ECHO引脚分别连接到数字12和13号引脚,负责发送和接收超声波脉冲,实现精准距离测量。将舵机固定在面包板或固定支架上,调整舵机臂初始位置,使其与PEZ角色耳朵的线相连。将线制成钩状,便于稳固连接,同时保证舵机转动时能够顺畅拉动头部,推动糖果从嘴部弹出。整体结构应保证机械动作精准,同时避免线缠绕或卡顿,影响发糖效果。 在软件编程部分,核心思想是利用超声波传感器实时监测前方是否有人靠近。一旦检测到距离小于设置阈值(例如20厘米),舵机会旋转至指定角度(例如180度)以拉动PEZ角色的头部,推动糖果弹出。
然后等待几秒钟(如5秒)为用户提供取糖时间,随后舵机回到初始闭合角度(90度),复位准备下一次触发。借助Arduino的Servo库和一个超声波测距库,可以使代码简洁高效。 具体代码实现中,首先引入Servo.h和Ultrasonic.h库,定义相关引脚和动作角度常量。初始化舵机并设置初始角度。主循环内,使用超声波函数获取距离值,通过串口监视器打印调试数据,确保传感器工作正常。根据距离判定是否触发开口动作,合理设置延时防止频繁触发造成机械疲劳。
代码结构清晰,易于调整阈值和动作时长,适合初学者理解和修改。 该项目不仅极大提升了PEZ糖果分发器的趣味性,更为学习Arduino硬件设计与编程提供了实践平台。通过感应式自动控制,机器人分发器具有良好的互动体验,特别适合作为电子竞赛、科技展览或亲子制作活动项目。同时,项目的模块化设计方便后续升级,例如增加红外传感器实现更复杂的检测逻辑,或结合WiFi模块实现远程控制与数据统计,为智能玩具开发奠定基础。 在实际操作过程中,应注意电源管理和安全问题。确保电压稳定且不超出设备承受范围,避免舵机过热或传感器故障。
合理固定机械结构避免晃动导致发糖不准确。调试期间使用串口输出帮助定位问题。定期检查线材连接避免松脱。项目完成后可以考虑用透明外壳保护,既彰显机械美感,又保护电子元件,延长使用寿命。 总结来看,利用Arduino打造的PEZ机器人糖果分发器是电子创客结合童趣与技术的典范。它不仅唤起人们儿时甜蜜的回忆,更通过智能传感与机械控制展示了DIY电子项目的魅力和潜力。
无论是初学者还是资深爱好者,都能从中获得丰富的学习体验和成就感。未来随着更多传感器和通信技术的融合,智能玩具必将更加多样与智能,提供更多新奇有趣的互动体验。对于渴望创造和探索的电子爱好者来说,改装经典PEZ分发器是一次完美的实践之旅,令人期待更多创意与可能的诞生。 。