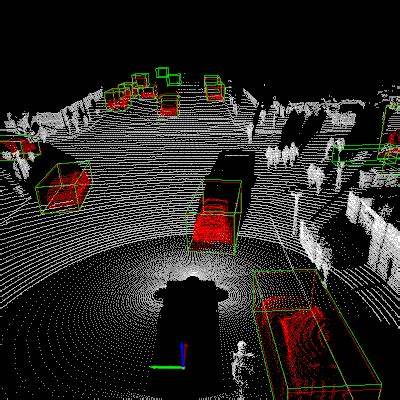
随着人工智能和计算机视觉技术的快速发展,远距离目标检测成为视觉感知领域的重要研究热点。然而,高昂的传感器成本和复杂的硬件限制往往制约了相关技术的普及和应用。鉴于此,利用廉价摄像头结合创新的像素运动投影技术,将二维图像信息转化为三维体素数据,成为一种颇具潜力的解决方案。这种方法不仅可以显著降低成本,还能有效提升对远处物体的感知和检测能力。像素运动投影到体素的基本原理是通过分析图像序列中像素的运动轨迹,将二维图像上的动态信息映射到三维空间中。这种映射将分散的像素运动聚合成为体素网格中的具体现实点,从而形成对空间中目标的三维表示。
传统的二维图像只能反映物体在平面上的形状和位置,难以精准获取目标的深度信息和空间结构。通过体素投影技术,摄像头捕获的动态像素信息被重新组织为具有空间感的三维数据,有助于实现更为精准的目标识别和距离估计,特别是在远距离场景下。这一技术的核心优势之一在于兼容性强,能够直接利用廉价的普通RGB摄像头,无需昂贵的激光雷达或深度相机,这大大降低了设备成本。同时,基于图像序列的运动分析利用现有的帧间数据,不需要额外传感器信息,保持了系统的简洁和易于部署。具体应用中,系统首先通过光流或特征跟踪算法,捕获连续帧之间像素的移动轨迹。然后将这些运动轨迹投影到预先定义的三维体素空间中,通过统计像素运动密度和方向,最终形成带有空间几何结构的体素分布。
该分布不仅反应了可见表面,还体现了目标的动态属性,例如运动速度和趋势。这一过程对计算性能有一定要求,但借助现代GPU加速和高效的数据结构,实现实时或近实时处理已成为可能。体素表示的三维数据可以被进一步利用于目标分类、行为预测以及环境建模,并且能与神经网络等高级算法结合,提升检测准确率和鲁棒性。远距离目标检测传统上依赖于深度传感设备或多摄像头系统,然而这些设备价格昂贵,且在复杂环境下易受遮挡和环境干扰影响。通过像素运动投影技术,廉价单摄像头系统也能有效提取场景深度和目标运动信息,实现传统设备难以达到的检测效果。此技术在智能交通监控、无人驾驶辅助系统、安防监控以及无人机视觉导航等领域拥有广泛的应用前景。
例如,在交通监控中,利用体素投影实现车辆和行人的三维位置估计,可以提升行为分析的准确性和响应速度;在无人驾驶领域,可辅助车辆感知远距离行驶中的目标,预防碰撞风险。技术挑战主要体现在运动估计的准确性及噪声抑制方面。由于传感器本身的限制和外界环境光照变化,像素运动的提取可能包含噪声或误差,影响最终体素重建效果。针对这些问题,算法层面采用多次迭代优化、正则化和多尺度分析等方法,可增强系统稳定性与鲁棒性。此外,体素网格的空间分辨率与计算成本彼此制约,设计时需根据具体应用场景平衡精度与实时性。学术界和工业界对此领域的研究逐步深化,开源项目和工具链不断涌现,促进了像素运动到体素投影技术的快速发展。
未来,结合深度学习的方法,有望实现自动特征提取和语义理解,进一步提升检测的智能化水平。综上所述,利用像素运动投影至体素的技术为廉价摄像头实现远距离目标检测提供了全新的技术路径。通过将二维动态像素信息转化为具有空间深度的三维体素表示,不仅突破了传统监测设备的限制,也大幅降低了成本门槛。随着算法优化和硬件性能提升,这项技术在智能视觉感知领域的应用潜能将愈加广阔,引领远距离目标检测先进技术的未来方向。