Yann LeCun作为深度学习的奠基人物之一,一直强调一个清晰的研究主张:真正强大的人工智能不会仅仅依赖大规模有监督或纯语言模型的规模堆叠,而应基于自监督学习和对世界的预测能力,构建可以在物理世界中感知、建模并采取行动的系统。近年来,他在公共演讲和论文中多次提出JEPA(Joint Embedding Predictive Architecture,联合嵌入预测架构)、能量基模型与世界模型的概念,试图为下一代人工智能描绘一条可行的路线图。本文从技术原理、与现有方法的差异、实际应用前景以及潜在风险治理等多维度,系统梳理LeCun的核心思想和研究方向。 自监督学习的核心价值在于利用未标注数据进行表征学习,这一范式对LeCun尤为重要。不同于传统监督学习依赖大量人工标注,自监督学习通过构造预训练任务,让网络在海量原始信号中学习有用的特征。LeCun强调,感知系统的基本能力应来自预测未来或恢复丢失的信息,预测驱动的学习天然适合构建对环境有模型化理解的表征。
相比于对比学习等方法,预测性自监督不仅能捕捉表面相似性,还能鼓励模型内部形成因果和动力学相关的表示,从而更适合用于决策和规划。 JEPA是LeCun及其团队提出的一个关键架构设想,其核心思想是将高维感知流(如视觉帧、声音、触觉序列)映射到低维嵌入空间,然后在嵌入空间中进行预测,而不是直接在像素或原始信号上做预测。这样做的优点有两个:一方面嵌入空间更简洁、抽象,便于捕捉与任务相关的要素;另一方面在嵌入空间进行预测能避免像素级重构带来的模糊和高计算成本。JEPA通常包含编码器、预测器与解码器三部分,但不同于生成式重构目标,JEPA关注的是嵌入之间的一致性和可预测性,采用对比或能量基的目标函数来驱动学习。 能量基模型在LeCun的研究体系中占有特殊位置。他多次指出,概率生成模型在实际规模化上存在挑战,而能量模型提供了另一种表示分布的方法:通过定义能量函数来衡量样本的好坏,训练目标是使真实样本具有低能量、伪样本具有高能量。
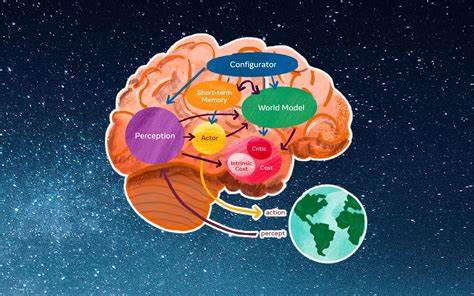
能量模型天然适合与自监督预测目标结合,因为预测任务可以被设计为降低未来真实嵌入的能量。LeCun还认为能量模型有利于实现更自然的探索、生成和规划行为,尤其当与嵌入预测相结合时,可以作为世界模型的核心组件。 世界模型一词在最近几年被广泛讨论,通常指代理对环境状态、动力学和因果关系的内部表征。LeCun强调世界模型不仅仅是对视觉帧的短期预测,而应当包含多模态信息(视觉、触觉、声音、语言和动作结果),并支持长期因果链条的建模。这样的模型能够让智能体进行想象式推理:在内部模拟不同动作或策略的后果,从而在不实际执行的情况下评估风险和收益。相比纯粹基于奖励的强化学习或仅依赖文本的语言模型,内建世界模型的系统更具样本效率和泛化能力,尤其在面对稀缺标注、复杂物理交互或长期规划问题时表现优越。
在与大规模语言模型(LLMs)的比较上,LeCun提出了颇具争议但发人深省的观点。他承认LLMs在语言理解、生成和知识提取方面取得了惊人成果,但指出它们并不等同于通用智能。主要原因包括LLMs缺乏对物理世界的直接交互经验、缺乏长期因果建模能力、对细粒度感知和行动闭环的支持不足。LLMs可以通过文本模拟常识推理,但无法通过自身感知系统进行实验和验证,因此在涉及物理操作、现实世界连续控制或多模态长期推理时存在结构性短板。LeCun主张将LLMs视作强大的语言处理器,但要实现更通用的智能,需要把自监督学到的感知表征、JEPA式的嵌入预测以及基于能量的世界模型与动作策略结合起来。 实际系统构建方面,LeCun设想的路径包含几个要点。
首先是多模态自监督预训练:在大量视频、音频、传感器数据中学习表示,使模型捕获时间动态性和跨模态关联。其次是在嵌入空间学习动力学模型,用预测目标而不是像素重构来约束未来的嵌入走向。再次是把世界模型与决策模块连接起来,通过内在想象(imagination)评估策略,进而指导实际动作选择。最后是在线学习与自主探查能力,使得系统在部署中继续积累经验,逐步完善对环境的模型。 这些思想并非纯理论。Meta(Facebook)和其他研究组织已经在视觉表征、自监督视频预训练以及基于嵌入的预测模型上取得了一系列实证成果。
实验显示,在下游任务中,基于嵌入预测的模型在样本效率和迁移能力上具有明显优势,特别是当任务涉及动态场景或需要跨时间的推理时更为显著。此外,在机器人控制、模拟环境中的长期规划任务里,内置世界模型的系统往往比单纯依赖强化学习或行为克隆的方法更稳定、更具泛化性。 尽管前景乐观,但实现LeCun提出的愿景也面临若干技术挑战。嵌入空间的设计和可解释性问题仍然突出:如何确保学习到的嵌入既能压缩冗余信息,又保留对决策至关重要的因果变量?如何衡量嵌入的好坏并避免模型从统计相关性中学到有害偏差?能量模型虽然概念优雅,但其训练稳定性和采样效率需要克服,尤其在高维、多模态场景下容易陷入局部最优。此外,从自监督预训练到可执行策略的无缝迁移需要更可靠的模拟-现实(sim-to-real)桥接技术,以及在现实世界中安全探索的机制。 社会与伦理层面的问题同样重要。
随着系统从纯语言能力扩展到物理世界的操作能力,风险也随之增加。可以想象的风险包括自主系统做出危险或不可解释的动作、误识别环境导致安全事故、以及恶意使用更加智能的机器人或无人机进行伤害。LeCun及其同行通常主张将安全与治理研究与技术研发并行推进,强调可验证性、透明性和人为监督在关键环节的重要性。研究社区也在探索可控性框架、可解释的世界模型以及更强健的在线监控手段,以期在创新与风险之间找到平衡。 从产业与应用角度看,基于自监督学习和世界模型的系统有广泛潜在落地场景。智能制造中,机器人可以通过学习工厂中物体的动态交互,自动优化抓取、装配与校准流程;自动驾驶领域中,世界模型可以用于更长时间尺度的路径规划和异常情况预测;医疗影像分析可以借助多模态预训练模型,从影像、文本与历史记录中学习疾病进展的动力学特征,从而提高诊断和治疗决策的准确性。
消费级应用方面,增强现实(AR)与家庭机器人也将从更强的物理世界理解中获益,实现更自然的交互和更可靠的服务。 未来研究有几条值得关注的方向。第一,如何在更大规模、多模态的数据上高效训练JEPA类架构,并验证其在长时序预测和因果推理上的优势。第二,能量模型与其他生成或判别机制的融合,寻找兼具训练稳定性与表达力的混合方案。第三,嵌入空间可解释性的度量与改进方法,使得学到的表征更接近可控制的因果变量。第四,现实世界中安全探索与在线学习的策略,既要保证样本效率,也要确保人的生命财产安全。
第五,在体系结构上探索将语言理解模块与感知-世界模型紧密耦合的路线,从而实现语言指令到物理行动的可靠转换。 总结来说,Yann LeCun关于自监督学习、JEPA与世界模型的主张,代表了一种从统计拟合走向物理建模和决策推理的研究取向。他认为未来的人工智能必须以对环境的预测性理解为核心,而不是仅仅依赖纯文本或大规模参数的堆叠。实践证明,嵌入级的预测、能量基目标与多模态自监督预训练在多种任务上已经展现出优势,但要达到真正通用、可控且安全的智能体,还需要在表示学习、训练稳定性、现实世界迁移与治理机制上做大量工作。对于研究者、工程师与政策制定者而言,关键在于既要推动技术进步,也要同步建立相应的安全、伦理与可验证框架,确保强能力系统的益处最大化、风险最小化。未来的人工智能发展曲线,很可能由对世界的理解深度和行动闭环能力决定,而LeCun的路线图为这一演进提供了富有洞见的理论与实践指引。
。









