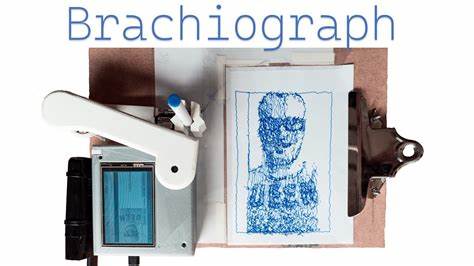
随着科技与创客文化的不断发展,电子制作项目越来越受到广大爱好者的关注与喜爱。其中,基于树莓派的Brachiograph绘图仪以其设计简单、成本低廉和高实用性吸引了众多技术爱好者。该设备通过机械臂的运动实现二维平面上的绘图,结合基础的三角函数计算方法,高效地将图像转换为线段,实现精准而灵活的绘制效果。Brachiograph的设计理念源自于对传统绘图机的突破与简化,采用树莓派作为控制核心,搭配适合的伺服电机和骨架构造,能够以极低的成本搭建一台功能强大的机械绘图设备。最初的设计中,采用的是塔式SG90伺服电机,因其体积小巧而价格便宜,但在绘图过程中易出现抖动与不稳定的现象,影响线条的完整性。为了提升绘图的稳定性和精细度,后续的改进版本中,选用金属齿轮MG995伺服电机替代了原有的电子件。
这种伺服电机拥有更强的扭矩和更耐用的结构,有效降低运动时的颤动,呈现出更加流畅的笔迹。同时,机械结构中增加金属支架固定伺服电机,强化连接强度,进一步减少步进过程中产生的误差。电气部分也经过合理优化,设计了简单的电路让各个伺服电机共用树莓派的地线端口,实现接线简化,确保系统的电气稳定性。Brachiograph绘图仪的核心技术在于运动轨迹的转换与控制。传统机械臂移动时,运动轨迹难以保证完全直线,往往会出现弧线偏差,影响最终绘图质量。为了解决这一问题,设计者将复杂的形状先矢量化处理,分割为极短的线段。
每一小段通过计算得到对应的伺服电机角度,经过三角函数公式的插值计算,实现机械臂在二维平面上近似直线的运动。如此细分后的动作指令能有效降低曲线带来的误差,令绘制效果更符合预期的图像轮廓。在实际操作中,用户只需将想要绘制的图片进行矢量化处理,生成适配Brachiograph运动规则的代码文件即可。设备读取指令后依序执行,使机械臂在坐标系内不断调整角度,带动画笔沿指定路径运动,逐步完成复杂图形的绘制。该项目不仅适合电子工程爱好者,也适合机器人初学者与数字制造领域的研究人员进行实验与开发。Brachiograph充分展示了开源硬件结合创新软硬件算法的力量。
其背后的数学基础虽简单,却是机械臂运动控制的关键。通过三角函数求解伺服电机转角,配合分段插值,机器精确完成线段绘制,体现了基础数学在实际工程中的应用美学。同时,Brachiograph的代码和设计均开源,依托GitHub等平台,相关技术文档与试验案例供用户学习借鉴,便于更多爱好者参与改良与创新,推动该项目持续发展。Brachiograph绘图仪的价值不仅在于低成本与易制造,更体现在推动电子创作民主化与艺术表达多样化。它鼓励创造者用最小的预算与知识门槛,打造属于自己的绘图机器人,激发对机械工程、自动控制及编程的兴趣。无论是教育教学、艺术创作还是技术研发,Brachiograph都提供了极具参考价值的平台。
未来,随着伺服技术和控制算法的进步,Brachiograph可结合人工智能与视觉识别,开发更智能的图像处理与路径规划,实现更广泛的应用场景。同时,材料与结构上的改进也可能让设备性能进一步提升,更适合高精度和大尺寸绘图需求。总之,Brachiograph绘图仪用现代电子技术与基础数学完美结合,提供了一种创新且实用的树臂机械臂绘图解决方案。它的成功证明了开源硬件的无限潜力,以及对创客文化推动科技普及的积极影响。对于想要进入智能硬件和机器人领域的学习者来说,Brachiograph是不容错过的优秀入门项目。同时,它也启示了更多设计者不断追求简单、高效、低成本的机械臂控制技术,催生更丰富的自动化与数字制造创新应用。
。