打哈欠作为一种广泛存在于动物世界中的行为,虽看似简单,却承载着复杂的生理与社交意义。多年来,科学家们一直对打哈欠的触发机制及其社会功能保持浓厚兴趣。尤其是在灵长类动物中,打哈欠不仅是一种基本的生理反应,还是一种彼此间传递状态和情绪的沟通信号。例如,通过观察他人打哈欠而产生的连锁反应,被称为传染性打哈欠(contagious yawning),被认为与感知共情和社交联结密切相关。近期,一项划时代的研究揭示,黑猩猩在看到一个高度仿真的人形机器人——安卓机器人打哈欠时,也会出现类似的模仿行为,这一发现为我们理解非生物体激发动物社交反应开辟了新视角。 人类与黑猩猩在生物演化上最为接近,因此它们在社会认知与行为反应方面有许多相似之处。
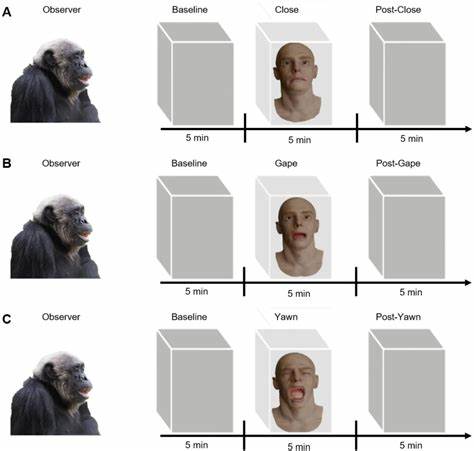
此前研究确认,黑猩猩间存在明显的传染性打哈欠,且这种现象多发生在群体成员之间,表现出社会情感共鸣的某些基础。但传统观点认为,传染性打哈欠主要受生物学和社交亲密度驱动,即须具备一定的物种熟悉度或情感联结才能引发。然而最新的实地实验极大地挑战了这一认知。 研究团队设计制造了一款仿真度极高的人形机器人,外观与面部肌肉动作均堪比真实人类,且能够精准控制包括普通张口和完整打哈欠等多种面部表情。通过对被收容于西班牙基金会的14只成年黑猩猩进行多轮测试,在机器人做出全张嘴打哈欠动作时,超过半数黑猩猩也表现出了打哈欠的行为,而当机器人仅是部分张嘴或保持口闭状态时,黑猩猩的打哈欠次数则明显减少甚至消失。更值得注意的是,黑猩猩不仅仅是在机械的模仿动作上作出反应,它们似乎在解读机器人打哈欠背后的可能含义,表现出更多与休息、放松相关的行为,如寻找和筑巢、躺下休息等,暗示它们将机器人打哈欠视为一种环境信号。
这些现象说明,传染性打哈欠的诱发并非单纯依赖于生物同类的视觉刺激,而是在更广泛的社交认知框架下进行感知与解码。换言之,尽管目睹的是机器人——一个明确的非生物体,黑猩猩却依然能够识别并对其发出的类似“打哈欠”信息产生共情反应。这一发现揭示了灵长类动物社交互动中更深层次的机制,即感知与模仿可能并不拘泥于物种界限,而更多依赖于行为特征与情境线索的传递。 从神经科学角度看,人和其他灵长类动物的“镜像神经元系统”与传染性打哈欠关系密切。这套神经元群体能在观察他人行为时产生类似的神经活动,从而促使自身产生相似行为反应。机器人动作的自然流畅性和近似人类的造型,可能激活了黑猩猩对应神经回路,体现了高度的动作感知与模拟能力。
在跨物种甚至跨物理实体(生物与机器)间,这一系统的作用尤为引人关注,为人工智能与机器人学提供了有力的行为验证基础。 此外,实验中观察到黑猩猩在看到机器人打哈欠后出现更多的躺下和休息行为,提示打哈欠行为不仅简单的模仿,还可能包含了信息传递的功能,即提示适合休息或者处于低警觉状态。这扩展了我们对打哈欠功能的理解,远不止生理调节,还是社交群体行为同步和状态协调的重要形式。机器人作为“社会代理”,能够发出具备生物含义的社交信号,说明非生物交互体在未来动物行为研究中拥有广阔的应用前景,同时促进了机器人在野生动物保护、行为康复和跨物种交流领域的探索。 该研究不仅加深了对动物社交反应起源和机制的理解,还对人工智能设计和人机交互提出了启示。随着机器人和仿生技术的进步,模拟自然界动作和表情的机器能成功触发自然界动物的社交行为,为环境丰富、行为康复提供新思路。
同时,这也为研究共情、模仿和情境认知等复杂心理机制架设了实验模型,有助于揭示这些认知过程的神经生理基础及其进化轨迹。 当然,目前尚需更多研究去明晰黑猩猩是通过何种感知路径和认知处理识别机器人动作的社会意义,及其心理动机是反射性的自动模仿还是更高级的推理和意图归因。同时,探索不同类型的机器人动作或其他社交信号是否能引发类似反应,将推动我们对非生物代理在动物社会生活中的角色认知。 未来跨学科研究应联合动物行为学、认知神经科学、机器人技术与人工智能,通过开发更具互动性的智能机器人系统,持续观察并解析多物种在面对非生物社会刺激时的行为动态和情感反应。此类研究不仅助力理解人类及其近亲动物的社交进化,还可能革新人机互动范式,实现更加自然与共情的机器社会代理应用。 总而言之,黑猩猩在面对会打哈欠的仿生机器人时展现出的传染性打哈欠行为,突破了传统物种与生物代理的界限,表明了高级灵长类动物具备对非生物体社会信号的感知和回应能力。
这一现象从生理、心理与进化多个层面均具有重大意义,开创了探索跨物种、跨实体社交互动的新纪元。未来继续聚焦这一领域,将推动我们重新定义社会认知的边界,促进科技与自然界的深度融合。