在智能交通和车联网快速发展的今天,车辆间通信 V2V(Vehicle-to-Vehicle)已成为提升道路安全、减少交通事故的重要技术路径。Mo3az99/Graduation-Project-V2V 项目是一次面向实际应用与嵌入式平台的毕业设计实现,目标是在无需大量道路基础设施投入的前提下,通过车与车之间的数据交换实现碰撞预警、前车警示与基本避碰逻辑。该项目以开源代码形式托管在 GitHub,包含从硬件数据采集到网络广播、接收、融合与决策的完整链路,是学习 V2V 系统设计与原型实现的良好样例。项目团队由五位成员共同完成,包含移动端演示和示范应用,面向在埃及等道路基础设施相对薄弱的地区推广零成本或低成本的安全增强方案。 从工程结构上看,仓库以 Python 为主,实现了多个模块化组件。核心脚本包括 main.py 用于整体调度,broadcast.py 与 recieve.py 负责网络通信,leadingvehicle.py 与 car_controller.py 实现车辆行为逻辑与控制接口,ultrasonic.py 用于超声波传感器数据获取,Kalman.py 提供滤波与状态估计,FCA.py 与 ICA.py 涉及车队控制或相交路口避撞算法,plottingData.py 负责数据可视化,globals.py 保存全局变量与配置,launcher.sh 包含 Raspberry Pi 套接字配置启动命令。
README 中列出了项目依赖库,如 sympy、numpy、pynmea2、pyserial、pandas 与 matplotlib,并指示通过 python3 main.py 启动程序。通过这些模块,可以看出开发者把重点放在获取车辆 GPS 定位与速度信息、进行滤波与方向判断、通过网络共享处理后的数据以及实现基于相对运动学的碰撞预警逻辑。 在数据采集层面,项目借助外部硬件获取车辆的 GPS 定位与速度信息,并通过串口或相关接口将 NMEA 等格式的定位数据送入软件处理链。pynmea2 与 pyserial 的引入表明代码支持解析 GPS 串口输出并进行时序采样。针对定位噪声问题,Kalman 滤波被用于状态估计与平滑定位与速度数值,这对于判断碰撞风险及计算时间差至关重要。定位与速度是实现时间到碰撞(TTC,Time To Collision)计算的基础,leadingvehicle.py 中展示的 FCW(Forward Collision Warning)算法依靠 TTC 与阈值设定来触发预警,适当的阈值能够在保证较低误报率的同时及时提示驾驶员采取制动或转向动作。
网络通信部分是 V2V 系统的核心要素之一。Broadcast 模块负责定期将当前车载状态(位置、速度、车头方向、车辆 ID 等)通过 UDP/TCP 或自定义套接字广播到局域网或点对点网络。Recieve 模块监听同一网络上的其他车辆广播并解析入站数据,随后将收到的目标车状态送入融合与决策模块。Raspberry Pi 作为常见的车载边缘计算平台,在本项目中被用于承载通信与数据处理逻辑,launcher.sh 提供了 RPI 上套接字配置与启动流程。这种基于 Wi-Fi 或局域网广播的实现方式适合原型验证与小范围车队测试,但在真实道路环境下应考虑网络延迟、分组丢失与安全认证等挑战。 算法层面,项目涉及若干与路径预测与碰撞预警相关的实现。
通过对邻车位置与速度的实时采集,可以基于相对速度与距离计算 TTC,并据此决定何时触发 FCW 警报。若干模块名如 FCA 与 ICA 暗示包含车队控制算法(FCA 可能代表车队控制算法 Fleet/Formation Control Algorithm)以及交叉口避碰逻辑(ICA 可能代表 Intersection Collision Avoidance)。这些算法通常需要预测车辆轨迹、判断潜在冲突点并基于优先级或协商机制进行路径调整。结合 Kalman 滤波的状态估计,可以改善短期轨迹预测精度,降低误报与漏报。 传感器融合是提升 V2V 系统可靠性的关键环节。项目集成了超声波传感器模块 ultrasonic.py,用于短距障碍物检测,弥补 GPS 在低精度或高遮挡环境下的不足。
将超声波、GPS、速度计以及来自其他车辆的位置信息融合到统一状态估计中,可以实现更稳健的碰撞检测与轨迹判断。在没有高精度地图与差分 GPS 的条件下,基于多传感器的数据融合是实现实用安全功能的现实路径。 从部署角度,项目提供了清晰的依赖说明并能在 Raspberry Pi 或任意支持 Python3 的单板机上运行。部署流程先安装依赖包,包括数值计算与串口解析库,然后将主程序与启动脚本部署到车载计算节点。运行中需要注意串口权限、GPS 模块与传感器的物理连接、网络配置以及日志记录。plottingData.py 可用于离线或在线分析系统行为,帮助开发者回溯预警触发条件、定位误差来源与网络延迟影响。
在工程实践中,有若干值得关注的挑战与改进方向。首先是通信安全与隐私保护。当前的广播机制若未加入加密与认证,很容易遭受伪造数据或篡改攻击。为提升实用性,应考虑加入消息签名、对称或非对称加密、以及访问控制策略。其次是时延与同步问题。V2V 系统对低延迟和时序同步有较高要求,尤其是当车辆高速接近时,毫秒级的延迟差异可能影响预警效果。
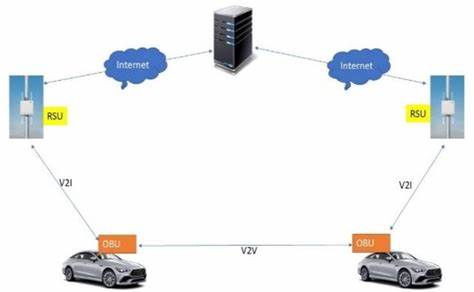
可以引入同步机制或时间戳验证以及重传策略来改善可靠性。第三是标定与鲁棒性。在不同车辆和传感器组合下,传感器标定、滤波参数与阈值需要适配与在线调整,建议加入自适应参数估计或基于机器学习的方法来自动优化阈值与预测模型。第四是可扩展性与互操作性。现实世界的 V2V 应用需要与更大的生态系统互通,例如支持 DSRC、C-V2X 协议或与路侧单元 RSU 集成,从而在更广泛网络下保持一致性能。 针对部署在埃及等发展中国家道路环境的现实情形,该项目具有特殊价值。
基础设施投资不足的背景下,基于车载设备的自组织 V2V 系统可以有效覆盖部分裸露的安全盲区。通过低成本硬件(如 Raspberry Pi、常见 GPS 模组和超声波传感器)与开源软件实现,能够在短时间内形成试点车队,积累交通行为数据并验证预警策略。进而可以与地方交通管理部门合作,推广基于车辆间协作的安全服务,如校车队伍管理、危险路段预警与临时事故告警网络。 对于开发者与研究者而言,该仓库是一个良好的起点。建议在本地环境中先运行示例数据,使用 plottingData.py 观察位置、速度与预警触发时刻,熟悉信号流与模块接口。若要在真实车辆上运行,应先在封闭场地进行测试,确保广播与接收逻辑在各种网络条件下稳定,验证超声波与 GPS 数据的时序一致性。
对于想要贡献代码的开发者,可优先改进通信协议的可靠性、加入消息加密支持、完善单元测试并扩展对更多传感器的支持,如 IMU 或摄像头。通过在 GitHub 上提出 issue、提交 pull request 与参与讨论,可以推动项目在安全性、性能与功能上的演进。 从教育与科研角度,该项目也具备多样化的延展空间。可以将其用作课堂实作项目,学生可以在现有框架上实现更复杂的轨迹预测模型、采用深度学习方法进行行为识别、或者对比不同滤波器(如扩展 Kalman 滤波 EKF、无迹 Kalman UKF)在定位精度上的表现。科研上可以基于该原型开展关于 V2V 协议鲁棒性、通信拥塞控制以及多人协同避碰策略的实验,并在仿真与实车测试之间建立可信的验证流程。 在商业化路径方面,项目的开源本质便于孵化初创企业或社会化服务。
通过包装成面向车队管理的安全套件,整合外部云端服务以实现车队远程监控、事故回放与统计分析,可以为物流、出租车与公交行业提供增值服务。与移动端演示相结合的用户界面能够在驾驶员与后台之间架起直观的交互桥梁,实时显示周围车辆状态、预警级别与历史事件。 综上所述,Mo3az99/Graduation-Project-V2V 是一个实用性强、面向嵌入式实现的开源 V2V 原型工程。它覆盖了从 GPS 数据采集、滤波估计、网络广播接收到基于 TTC 的碰撞预警等关键环节,适合用于教学、研究与初步的试点部署。未来的改进可以聚焦在通信安全、延迟控制、传感器融合精度提升与标准化互操作性方面。对于希望参与者,建议先在本地或封闭环境中熟悉代码结构与数据流,逐步扩展传感器支持与通信协议,并通过 GitHub 协同开发推动项目成熟度。
随着车联网技术的普及与成本下降,像这样以低成本硬件和开源软件为基础的 V2V 解决方案将在提升道路安全方面发挥更大的作用。 。