随着人工智能和机器人技术的迅速发展,精确的人体姿态估计和动作捕捉成为各界关注的焦点。手部动作作为人类日常活动的重要组成部分,其复杂的结构和灵活的运动特性为视觉识别和动作理解提出了极大挑战。基于Jax的运动学手部骨骼优化技术正是针对这一挑战提供的创新解决方案。该技术结合多摄像头多视角数据采集、二维关键点检测、三维关节位置重建以及运动学模型的优化方法,实现了对手部动作高度精确且高效的解析和重建。Jax作为Google推出的结合了自动微分和高性能数值计算的深度学习框架,极大地提升了优化过程中的计算效率和梯度计算精度,为运动学手部骨骼模型的多参数优化提供了坚实的技术支持。 运动学手骨骼模型的核心目标是将时间同步且经过校准的多摄像头视频数据转换为具体的轴角关节角度(θ)和具有度量单位的三维关节空间位置。
这不仅为机器人手部动作的逆向映射和细微动作学习提供了“动作燃料”,也为仿真、虚拟现实和增强现实等多领域的精细动作捕捉奠定了基础。相比于仅仅依赖二维关键点或简单三维点云,运动学模型通过结合骨骼结构的先验知识和约束,能够更精准地还原出手指的骨骼旋转状态,实现动作在不同平台和设备间的无缝转换。 为什么运动学手骨骼模型如此重要?它具备多项不可替代的优势。首先,所谓的“Rig-agnostic Pose”指的是该模型能够捕捉骨骼相对旋转,不受具体骨骼绑定方式和设备的限制,从而能够适配不同的虚拟手部或机械手部。这为机器人手部动作设计提供了极大的便利。其次,前向运动学(FK)运算的单次传递即可实现复杂动作的复现,极大简化了动作重定向的流程。
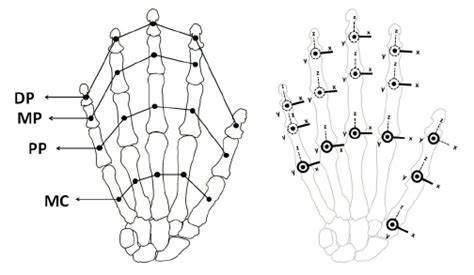
此外,该模型以约60个浮点数的紧凑形式表示每帧动作,节省了存储资源。骨骼长度、关节角度限制等约束条件内嵌于模型,使动作生成更加自然且符合生理结构。借助Jax的自动微分能力,实现了基于二维图像误差的端到端优化,显著提升了三维位姿恢复的精细度。该方法还能够融合IMU、运动捕捉标记等多种传感器数据,增强了动作估计的鲁棒性和适应性。 运动学手部骨骼优化的关键在于捕获轨迹到关节角度的映射过程。其数据流始于多路时间同步的RGB视频帧,经由二维关键点检测器获得每帧图像中的像素空间关节位置。
基于相机的内外参数,通过三角测量或PnP(Perspective-n-Point)算法将二维点转换为带有真实物理尺度的三维关节位置。接着,最具挑战的部分是逆运动学(IK)阶段——通过求解优化问题反推出满足三维空间位置的轴角关节参数。为了验证逆解的准确性,最终通过前向运动学(FK)重新构建三维点,保证误差在容忍范围内。完成优化后,系统将得到一整套关节角度序列以及对应的三维关节坐标,实现对手指动作的细节级重现。 在实际应用层面,Jax提供了卓越的梯度计算和GPU并行能力,使优化过程中的参数调整迅速且精确。利用其函数式编程风格,能够轻松进行梯度反传和自定义复合运算,实现复杂的运动学模型训练和迭代更新。
与传统深度学习框架相比,Jax在细粒度物理约束和连续空间参数优化方面表现出无可匹敌的优势。此特性使得运动学手部骨骼优化不仅适用于学术研究,也能够很快转化为工业级产品,例如机器人手臂控制、虚拟手势识别以及沉浸式VR交互设备中的动作跟踪模块。 此外,整个流程对硬件环境提出了特定要求。当前项目推荐在Linux操作系统下运行,以保证依赖项的兼容性和性能。通过Pixi这一包管理器,可以方便快速地搭建开发环境及运行必要的计算命令,如多摄像头校准工具、姿态估计和三维数据可视化模块。其模块化设计不仅支持HOCap和Assembly101等专业动作捕捉数据集,也为后续自定义手势捕捉和仿真提供了良好基础。
该技术潜力尤为突出的是动态人机交互与远程操作领域。结合基于grpc服务器的传感器数据采集,可以实现基于手机端ARFlow应用的实时手部动作采集与优化,适用于远程机器人操作、虚拟主播的手势驱动甚至康复医疗训练等多场景。将高精度优化输出的轴角参数,传入工业仿真平台Isaac Sim,能够快速实现动作的机器人端映射并进行模拟测试,极大简化了动作调试和方案验证流程。 目前,相关项目还在持续完善中。未来计划涵盖更丰富的传感器融合,如IMU惯性数据结合视觉信号,实现更高鲁棒性的动作捕捉,并拓展至第一视角头戴设备的视角补偿与动觉识别。同时,动作模仿学习与远程遥控系统(teleoperation)也在积极研究之列,致力于实现更自然的人机协作和自主学习能力。
整体来看,基于Jax的运动学手部骨骼优化技术实现了从二维图像数据到精确三维动作参数的闭环,大幅提升了手部姿态估计的实用价值和技术深度。 总结而言,运动学手骨骼优化利用现代计算框架和多视角传感技术,为机器人和虚拟现实领域带来了精细且高效的手部动作解码方案。结合Jax的自动微分优势与高性能数值计算,使得传统复杂的运动学逆解问题得以用端到端优化策略进行解决。未来随着硬件计算能力和传感技术的进一步发展,此类技术将在智能机器人、交互游戏、辅助医疗等诸多领域发挥更大影响力。对于希望深入掌握手部动作捕捉与建模的研究人员与开发者而言,理解和运用基于Jax的运动学手部骨骼优化,将成为推动技术革新的关键一步。