随着人工智能和机器人技术的飞速发展,机器人在工业、医疗、服务等众多领域展现出巨大潜力。然而,机器人智能化的关键在于训练高质量的基础模型,而这离不开海量且多样化的真实机器人操作数据。当前,机器人领域面临着数据匮乏的严重问题,远远达不到训练强大机器人基础模型所需的数据规模。尽管模拟环境和视频数据可以作为辅助,但都无法完全替代真实的机器人操作数据。如何高效、持续地采集大规模真实数据,成为推动机器人智能革新的一道必答题。 近年来,一种基于AI增强的遥控操作(teleoperation)技术引起业内广泛关注。
传统的遥控操作因存在控制延迟、缺乏空间感知、触觉反馈受限及操作者劳累度高等问题,多应用于高价值、低频次的场景,如核废料拆解、远程医疗手术等。操作效率低下且难以长时间维持,难以满足大规模数据采集需求。通过引入人工智能辅助机制,遥控操控正在迎来全新变革,向着更高速、更智能、更可持续的方向发展。 AI强化遥控操作的核心理念是实现人机协同控制。操作者依托虚拟现实(VR)技术,通过摄像头多角度视频反馈操纵机器人,克服了传统线视距操作的局限与人体工程学负担。网络环境模拟了300毫秒的通信延迟以及10毫秒的抖动波动,以体现国际远程遥控的真实网络情况。
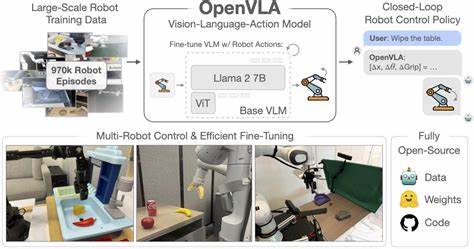
纯人类遥控操作中,因网络延迟和视觉信息缺失,操作者常采取“等观察”策略,操作节奏缓慢且易感到心理疲惫。机械臂动作缺乏灵活度,加剧了操控难度。 而AI的介入显著提升了操作效果。AI模块分为“动作AI”和“人机共控AI”。动作AI基于视觉语言动作模型(VLA)、计算机视觉、运动规划和动态运动基元等技术,对夹持、抓取等子任务进行自动执行。人机共控AI则动态判断何时由AI介入执行,何时由操作者掌控,实现动作融合与权重分配。
这样既保留了人的灵活应变能力,又依托AI的高速精准操作分担大部分工作,极大缓解了操作者的精神压力和操作强度。 实际测试证明,配备AI辅助的遥控系统能使经验丰富的操作者操作速度提升100%至150%,对新手操作者的提升则更为显著。长时间操控的可持续性得到明显改善,操作体验更加流畅自然。尽管如此,要进一步突破速度极限和操作稳定性,除了优化AI算法,还需提升机器人硬件性能、增强三维远程感知能力、完善网络通讯架构以及人机交互界面的设计与人体工程学研究。 数据规模的飞跃对机器人基础模型训练至关重要。目前机器人领域需要的数据规模与现实可获取数据相比,尚有五到六个数量级的差距。
纯依赖模拟环境训练虽然可以加速模型开发,但模拟与现实的差异限制了模型泛化能力。大量真实数据采集则为训练机器人具备真实环境复杂性下的感知和操作能力提供保障。借助AI增强遥控操作的技术积累,有望实现机器人在各类复杂场景下的持续数据采集,快速丰富数据资源。 更为重要的是,AI增强的遥控操控不仅是数据采集的工具,更是实现未来通用机器人部署的关键技术基础。实现机器人长时间、高效、稳定的远程操控,将促进机器人向服务型、多任务协作和智能化方向发展,最终推动机器人在生产制造、仓储物流、家庭护理、公共安全等多领域的广泛落地。 业界对此类技术的探索集中于几个方向。
首先,提升视觉语言动作模型的泛化能力,使其能处理更多样化和动态变化的任务场景。其次,结合强化学习优化动作执行策略,实现动作更为自然与高效。再次,发展更精准的三维远程感知技术,包括多模态传感器融合,减少操作者对环境的感知盲区。最后,网络延迟与带宽的进一步优化也是关键,利用边缘计算和5G网络技术,可显著改善远程操作的实时性与稳定性。 此外,人体工程学和人机界面设计同样不可忽视。VR或增强现实(AR)设备的佩戴舒适性、操控手柄的反馈机制、界面的信息呈现方式等,都会直接影响操作者的操作效率与持续工作时间。
合理的流程设计和操作指导也有助于快速培养新手操作者,扩大数据采集的人力基础。 这项技术的社会价值不可估量。从工业视角看,能够大幅提升机器人操作速度和安全性,有助于减少人工成本和事故风险,提高生产效率。在医疗等高风险领域,实现高效且低疲劳的远程机器人操控,可以保障手术质量和患者安全。普通消费者亦能受益于更智能、更自主的服务机器人,将日常劳务自动化推向新高度。 作为英国Createc应用机器人研发团队的负责人,项目主导者拥有丰富的AI与机器人混合系统开发经验及创业背景。
在发展早期积极寻求行业反馈与合作伙伴,展现了开放共赢的创新态度,有望推动技术快速转化与产业化应用。 总结来看,AI增强的远程操控技术为解决机器人大规模真实数据采集难题提供了可行路径,为机器人基础模型的训练奠定坚实基础。实现人与AI的有机协作,智能提升操作效率和操控体验,不仅打破了传统遥控操作的各类壁垒,也为通用机器人广泛部署和真实作业场景适应能力的突破铺就道路。未来,随着技术的不断进步和多领域的融合创新,机器人智能化和普及应用将迎来质的飞跃,催生更多前沿科技和产业变革。









