月球作为人类探索太空的重要前哨,因其极端的环境条件,一直被视为充满挑战的目标。月球表面不仅受到强烈的太阳辐射和剧烈的温度变化影响,还面临没有大气层保护的高速微流星体撞击威胁。地表温度昼夜跨度惊人,白天最高可达121摄氏度,而夜晚最低降至零下146摄氏度,极地温度甚至可能低至零下240摄氏度的永久冰冻环境。复杂多变的环境使得保障宇航员安全和设备正常运行成为极具难度的课题。自然形成的月球熔岩洞穴,以其天然的屏蔽能力,成了未来人类在月面建立基地的理想选择。熔岩洞穴是远古火山活动中形成的地下空隙,部分区域顶部坍塌形成的"天窗"成为进入地下空间的天然通道。
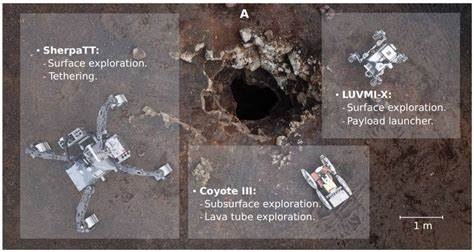
目前利用轨道探测器所拍摄的影像,科学家们发现了多个熔岩洞穴的天窗,尽管洞穴的具体尺寸和结构仍需深入探索,但其深度可达数十甚至百米。类似地表崎岖的狭长熔岩沟壑 - - 如长达566公里的月球近岸的利马夏普,更体现了这类地形的丰富多样性。欧洲多个科研机构联合,针对月球熔岩洞穴的实际勘察需求,设计出一组由三台功能互补的机器人组成的探索团队。这支团队的设计理念在于机器人间的协同作业,不仅提升任务的安全性,还可大幅降低探测成本。该研究成果发表于2025年权威期刊《Science Robotics》,由德国人工智能研究中心机器人创新中心领导的Raul Dominguez团队开发并执行了相关模拟测试。三款机器人分别采用不同的机动方式和任务分工。
SherpaTT是一款结合轮式和腿式混合驱动的机器人,主要负责月面地形探测及作为固定平台,为另一个机器人 - - Coyote III提供支援。Coyote III是一款轻量级、高机动性的轮式侦察机器人,通过SherpaTT的牵引装置被缓缓下降进入洞穴内部,进行地下空间的详细勘测。第三款LUVMI-X则是一款轻便、经济实惠的机器人,负责辅助探测和地图制作,与SherpaTT协作绘制洞穴入口及周边区域的环境地形数字高程模型。整个探测流程可分为四个阶段。起初,SherpaTT和LUVMI-X携手合作,对火山熔岩洞穴天窗周围地形进行测绘,为进入洞穴的后续任务做好定位和条件判定工作。紧接着,LUVMI-X发射改装的传感器负载立方体,这种装置搭载高速摄像设备,在模拟月球低重力条件下自由坠落,迅速收集天窗内部结构和洞穴地面的初步视觉数据。
随后,Coyote III机器人被缓缓下降到熔岩洞穴的深处。在这一过程当中,地面上的SherpaTT机器人稳定地固定着牵引绳索,保证Coyote III的安全着陆。最后,Coyote III展开自主探测,携带高精度扫描设备进行三维环境重构和地形映射。为验证计划的可行性,研究团队选择了位于西班牙加那利群岛兰萨罗特火山岛进行多次野外测试。该地点因其类似月球熔岩管地形而成为理想的地面模拟环境。2023年2月的测试显示,SherpaTT和LUVMI-X有效地合作完成了高精度数字高程模型的生成,在目标区域成功识别出洞口和合适的部署位置。
负载传感立方体的自由落体模拟,利用滑轮装置再现了月球重力约为地球六分之一的环境,立方体成功获取了三维空间数据,证明初期洞穴数据采集方法的有效性。Coyote III机器人在被稳妥放下后,面对洞穴内各种苛刻地形如碎石和陡峭斜面表现出良好的机动性能,顺利完成了局部区域的点云数据采集任务,虽然在较复杂地形中进行转向存在摩擦力偏大导致的操作困难,但整体任务完成情况令人满意。这套机器人团队的成功验证,为未来月球乃至火星熔岩洞探测奠定了技术与实践基础。熔岩洞穴不仅能够为人类在未来太空基地建设提供宝贵的辐射屏障,也具备保存外星生命迹象的重要科学价值,特别是在火星这样的星球上。此外,由机器人团队进行自主探索避免了宇航员直接面对未知环境的高风险,使得探测任务的经济效率和安全性大幅提升。随着探测技术的进一步发展,这种多机器人协同作业模式有望被应用到更多复杂的空间环境中,包括地外月面深层洞穴、高陡壁和崎岖地形。
未来计划中,还将针对机器人系统的能耗管理、通信网络延伸及人工智能的自主决策算法进行优化,提升其在无地面指令干预情况下的整体任务执行能力。月球熔岩洞穴的探测不仅是科学探索的前沿,更是人类太空生存和长期驻留迈出的关键一步。欧洲机器人团队的这一创新研发,标志着探月技术迈向更高智能化和协同性,为即将到来的月球基地建设、火星远征及更大范围行星地质考察提供了坚实的技术支撑。未来,熔岩洞穴有望成为宇航员的安全避风港,也将成为搜寻外星生命的理想场所。这种突破性的机器人探索方法,将推动人类在探索宇宙的道路上不断前行,开辟出一条通往深空的崭新航线。 。