在地图编辑、策略游戏、程序化生成和图形渲染中,网格(grid)是最基础但最关键的数据结构之一。不同类型的网格 - - 方格、六边形、三角形 - - 在坐标表达、邻接关系和几何变换上各有特点。理解网格的"部件与关系"能够帮助工程师在地图表示、寻路、碰撞检测与渲染之间构建清晰、可靠且高效的实现。本文从面(tile/face)、边(edge)、顶点(vertex)三类基本部件出发,解释常见坐标系、如何在部件之间建立映射与查找算法,并给出工程实现与优化建议,方便在游戏开发或学术研究中复用。 网格的三个基本部件决定了大部分操作的语义与性能。面表示可行走、可占据或可渲染的区域;边表示面与面的分界、通行路径或方向约束;顶点表示多面交汇的角点,是连接路径和几何计算常用的参考点。
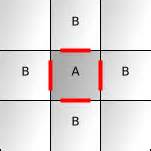
把这三类部件都建模出来,并定义清晰的关系,例如"面邻居""边的端点""顶点所接触的面",能让地图查询、拓扑变换与几何运算的代码更直观且易维护。 方格网格是最常见的形式,二维整数坐标(q, r)通常用于标识每个方格面。方格面有四个边和四个顶点。面与面的邻接通常为上、下、左、右四向,也可以扩展为八向包含对角线。常见的关系包括:面到邻居(Neighbors)、面到边界边(Borders)、面到顶点(Corners)。这些关系可以通过简单的坐标偏移实现。
例如在以y向下为约定的坐标系中,邻居偏移为(0,-1)、(-1,0)、(0,1)、(1,0)。边可以采用共享模型:将每个方格的西边与左侧相邻方格的东边合并,北边与上方相邻方格的南边合并,避免重复存储并简化边的查询与连接关系。顶点则可以选取方格的一个角(例如左上角)作为顶点坐标来共享,以减少顶点数量并能快速找到一个顶点关联的多个方格。 方格网格在工程实现上非常直观,面用整数对存储,边可以用三元组(q, r, side)表示侧边方向,顶点可以用整数对或偏移表示角点位置。将查找逻辑封装成小函数(如GetNeighbors、GetCorners、EdgesFromFace)可以大幅提升代码可读性。渲染或物理计算时,常常需要将网格坐标转换为世界坐标,这个变换由两个轴向量i和j及平移量构成,世界坐标 = i * q + j * r + offset。
对于方格,i和j通常是整齐的轴对齐向量,变换和反变换都很容易计算,便于拾取与射线检测。 六边形网格在策略游戏和地图可视化中广泛使用,因为它们在距离计算、视野覆盖和均匀邻接性上有天然优势。六边形的坐标系统较方格复杂但更灵活。轴向(axial)坐标系用两个坐标(q, r)表示每个六边形面,同时隐含第三个坐标满足q + r + s = 0。六边形的六个邻居可通过固定的偏移集合得到,偏移集可以在点顶朝(pointy)或平顶朝(flat)布局之间切换。六边形的边数为6,顶点数为6,但顶点很自然地被多个六边形共享,因此顶点的表示可以选择只记录两类顶点(例如北和南)并通过映射找到对应的相邻面,从而减少冗余。
在六边形网格中,常见关系包括邻居(六方向)、边界边(Borders)、顶点(Corners)以及更复杂的触碰、突出(protrudes)或相邻(adjacent)关系。边可以以(q, r, side)表示,side指向六个方向之一。六边形顶点的坐标系统会比面更复杂一些,因为一个顶点通常由三个六边形共享,因此在顶点到面或面到顶点的映射中需要考虑方向标签或者在顶点记录一组面引用。六边形距离计算中常用的技巧是把轴向坐标转换成三维"立方体坐标"来计算曼哈顿距离,这使得距离、范围填充与直线绘制变得简洁。 三角形网格常出现在三维图形的平面拆分、某些策略地图以及偶发的网格化场景中。三角形网格有向性:每个面要么指向上要么指向下(或左/右,取决于布局)。
因此每个方格单元在分裂成两个三角时,需要以额外的"方向"标识来区分左右或上下两个三角形。三角形与六边形在拓扑上互为对偶:六边形的顶点像三角形的面,六边形的面像三角形的顶点。这一对偶关系可以在算法设计上带来启发。例如可以把某些三角形的邻居问题映射为六边形顶点的查询,从而复用已有逻辑。 在实现三角形网格时,面可以定义为(q, r, orientation)三元组,orientation一般用字符或布尔值表示上/下或左/右。边的类型会比方格更多样,因为一部分边来自切割原方格的额外边。
顶点的坐标通常和方格顶点一致,因此能直接重用方格的顶点索引。点到面转换时的关键在于先将点映射到包含它的基本菱形(rhombus)或方格单元,再根据位置判断它属于左侧还是右侧的三角。几何上用轴向量i、j进行转换,面中心的计算需要对不同方向的三角形加上合适偏移以得到正确的中心点。 网格之间的变换与坐标映射非常重要。通用的模式是先定义基础轴向量与基点,然后为每种部件提供映射函数。面到顶点的映射运算通常只涉及有限的偏移量集合,边到端点的映射也一样。
实现时把这些偏移数组以常量表格形式存储,能够换来更少的条件分支和更高的透明度。对于六边形,轴向偏移表和立方坐标互转函数是常备工具。对于三角形,判定位于L或R面通常用小于1的分数和小数部分之和来判断点相对于对角线的位置,这在把世界坐标映射回三角形面时很有用。 性能与存储优化是实际工程中经常要考虑的两点。避免冗余存储是首要目标:边与顶点通常被多个面共享,采用共享句柄(handle)或索引能显著节省内存且简化查询。对于大规模地图,稀疏存储结构如哈希表或平衡树可以替代完整二维数组,尤其是当地图呈非矩形、具有洞或分散岛屿时。
预计算邻接表能够加快寻路和可视化更新,但会增加维护复杂性;在动态地图(例如建筑被移除或添加)中,需要兼顾更新策略。 寻路与距离计算在网格应用中最常见。方格使用曼哈顿距离、切线距离或对角权重来处理不同移动规则。六边形使用轴向坐标或立方体坐标下的运算,能获得精确且对称的距离值。三角形距离可以通过将三角形转换为顶点图或边图来复用链路搜索算法。在路径搜索时,把面、边、顶点建模为独立实体可以让算法在不同粒度上运行:面级寻路适用于整体移动,边级或顶点级寻路可用于精确的碰撞或网格动画。
调试和可视化对实现网格关系非常关键。绘制边界、邻接线和顶点索引能够快速发现偏移错误或索引越界。在开发阶段把转换函数(网格↔世界)暴露出来,配合鼠标拾取和高亮显示面、边、顶点,能帮助确认方向约定是否一致。单元测试应覆盖基础的关系函数,如Neighbor、Corners、Joins、Continues、Endpoints等,以确保在坐标系变化或地图拓扑改变时,关系仍然正确。 工程实践中还要注意语义一致性。命名约定要清晰,例如统一使用"q,r"为轴向坐标,使用"N,E,S,W"或数字索引表示边方向。
对于有方向性或有状态的部件(例如三角形的L/R),应在类型系统中明确表达,使用枚举或受限字符串以减少运行时错误。数据结构设计上,面、边、顶点应包含最小必需字段,并通过索引表建立反向映射(如从顶点到其关联面列表),以支持高效的查询。 网格的可扩展性值得关注。很多应用不仅仅需要二维平铺,还要支持多层结构、带权重的边、动态障碍或流域计算。为这些扩展预留数据字段或可插拔的组件接口能够降低未来修改成本。对于需要高性能并行计算的场景,保持网格结构的内存连续性和简化邻接访问模式能更好地利用缓存和SIMD指令。
总结来看,清晰地把网格拆成面、边、顶点三类部件,并为每类定义精确的坐标与关系,是构建可靠地图与几何系统的基础。方格以简单直观著称,适合大多数传统地图;六边形提供对称邻接和精确距离计算,适合策略与区块化游戏;三角形在对偶关系与细粒度几何上有独特优势。工程实现中应重视坐标系约定、共享存储、查找表与世界坐标变换,同时在测试与可视化上投入足够的精力。通过这样的设计,网格可以既表达复杂的拓扑结构,又保持良好的性能与可维护性,满足游戏开发、地理信息系统与科研计算等广泛场景的需求。 如果需要具体代码示例、不同坐标系的偏移表或针对某种引擎的实现建议,可以提供目标平台与语言,我可以给出可复制的实现片段和测试用例,帮助快速在项目中落地这些概念。 。